Coding Notes
1 Introduction
Notes
-
Problem: binary relationship from inputs to outputs
-
Algorithm: procedure mapping each input to a single output
- An algorithm solves a problem if it returns a correct output for each and every problem input
-
Correctness:
- For small inputs: can use case analysis
- For arbitrarily large inputs: algorithm either is recursive or loop in some way. Use induction.
-
Efficiency: how fast does an algorithm produce a correct output?
- Count the number of fixed time operations algorithm takes to return
- Asymptotic Notation: ignore constant factors and low order terms
input constant logarithmic linear log-linear quadratic polynomial exponential \(n\) \(Θ(1)\) \(Θ(log n)\) \(Θ(n)\) \(Θ(n log n)\) \(Θ(n^2)\) \(Θ(n^c )\) \(2^Θ(n^c)\) \(1000\) \(1\) \(≈ 10\) \(1000\) \(≈ 10,000\) \(1,000,000\) \(1000^c\) \(2^1000 ≈ 10^301\) Time \(1 ns\) \(10 ns\) \(1 µs\) \(10 µs\) \(1 ms\) \(10^{(3c-9)} s\) \(10^281 millenia\) -
Model of Computation: what operations on the machine can be performed in \(O(1)\) time.
- Machine word: block of w bits (w is word size of a w-bit Word-RAM)
- Memory: Addressable sequence of machine words
- Processor supports many constant time operations on a \(O(1)\) number of words (integers):
- integer arithmetic: (+, -, *, //, %)
- logical operators: (&&, ||, !, ==, <, >, <=, =>)
- bitwise arithmetic: (&, |, «, », …)
- Given word a, can read word at address a, write word to address a
- Data Structure: a way to store non-constant data, that supports a set of operations
- A collection of operations is called an interface
- Example:
- Sequence: Extrinsic order to items (first, last, nth)
- Set: Intrinsic order to items (queries based on item keys)
- Data structures may implement the same interface with different performance
- Example: Static Array - fixed width slots, fixed length, static sequence interface
StaticArray(n): allocate static array of size n initialized to 0 in \(Θ(n)\) timeStaticArray.get_at(i): return word stored at array index i in \(Θ(1)\) timeStaticArray.set_at(i, x): write word x to array index i in \(Θ(1)\) time
More on Asymptotic Notation
- \(O\) Notation:
- Non-negative function \(g(n)\) is in \(O(f(n))\) if and only if there exists a positive real number \(c\) and positive integer \(n_0\) such that \(g(n) ≤ c · f(n)\) for all \(n ≥ n_0\).
- \(Ω\) Notation:
- Non-negative function \(g(n)\) is in \(Ω(f(n))\) if and only if there exists a positive real number c and positive integer \(n_0\) such that \(c · f(n) ≤ g(n)\) for all \(n ≥ n_0\).
- \(Θ Notation\):
- Non-negative \(g(n)\) is in \(Θ(f(n))\) if and only if \(g(n) ∈ O(f(n))∩Ω(f(n))\)
2 Data Structures
Notes
Data Structure Interfaces
- A data structure is a way to store data, with algorithms that support operations on the data
- Collection of supported operations is called an interface (also API or ADT)
- Interface is a specification: what operations are supported (the problem!)
- Data structure is a representation: how operations are supported (the solution!)
Sequence Interface (L02, L07)
- Maintain a sequence of items (order is extrinsic)
- Ex: (\(x_0\), \(x_1\), \(x_2\), . . . , \(x_{n-1}\)) (zero indexing)
- use n to denote the number of items stored in the data structure
- Supports sequence operations:
| Type | Interface | Specification |
|---|---|---|
| Container | build(X) |
given an iterable X, build sequence from items in X |
len() |
return the number of stored items | |
| Static | iter_seq() |
return the stored items one-by-one in sequence order |
get_at(i) |
return the \(i^{th}\) item | |
set_at(i, x) |
replace the \(i^{th}\) item with x | |
| Dynamic | insert_at(i, x) |
add \(x\) as the \(i^{th}\) item |
delete_at(i, x) |
remove and return the \($i^{th}\) item | |
insert_fist(x) |
add \(x\) as the first item | |
delete_first(x) |
remove and return the first item | |
insert_last(x) |
add \(x\) as the last item | |
delete_last(x) |
remove and return the last item |
- Special case interfaces:
- stack:
insert_last(x)anddelete_last() - queue:
insert_last(x)anddelete_first()
- stack:
Set Interface (L03-L08)
- Sequence is about extrinsic order, set is about intrinsic order
- Maintain a set of items having unique keys (e.g., item x has key x.key)
- Set or multi-set? We restrict to unique keys for now.
- Often we let key of an item be the item itself, but may want to store more info than just key
-
Supports set operations:
Type Interface Specification Container build(X)given an iterable X, build sequence from items in X len()return the number of stored items Static find(k)return the stored item with key k Dynamic insert(x)add x to set (replace item with key x.key if one already exist) delete(x)remove and return the stored item with key k Order iter_ord()return the stored items one-by-one in key order find_min()return the stored item with smallest key find_max()return the stored item with largest key find_next(k)return the stored item with smallest key larger than k find_prev(k)return the stored item with largest key smaller than k - Special case interfaces:
- dictionary: set without the Order operations
Array Sequence
- Array is great for static operations!
get at(i)andset at(i, x)inΘ(1)time! - But not so great at dynamic operations…
- For consistency, we maintain the invariant that array is full.
- Then inserting and removing items requires:
- reallocating the array
- shifting all items after the modified item
| Sequence Data Structure | API Type | Worst Case \(O(\cdot)\) | |||
|---|---|---|---|---|---|
| Array | Container | Static | Dynamic | ||
| API | build(x) |
get_at(i)set_at(i) |
insert_first(x)delete_first() |
insert_last(x)delete_last() |
insert_at(i, x)delete_at(i) |
| Array | \(n\) | \(1\) | \(n\) | \(n\) | \(n\) |
Linked List Sequence
- Pointer data structure (this is not related to a Python “list”)
- Each item stored in a node which contains a pointer to the next node in sequence
- Each
nodehas two fields:node.itemandnode.next - Can manipulate nodes simply by relinking pointers!
- Maintain pointers to the first node in sequence (called the head)
- Can now insert and delete from the front in \(Θ(1)\) time! Yay!
- (Inserting/deleting efficiently from back is also possible; you will do this in PS1)
- But now
get_at(i)andset_at(i, x)each take \(O(n)\) time… :( - Can we get the best of both worlds? Yes! (Kind of…)
| Sequence Data Structure | API Type | Worst Case \(O(\cdot)\) | |||
|---|---|---|---|---|---|
| Array | Container | Static | Dynamic | ||
| API | build(x) |
get_at(i)set_at(i) |
insert_first(x)delete_first() |
insert_last(x)delete_last() |
insert_at(i, x)delete_at(i) |
| Linked List | \(n\) | \(n\) | \(1\) | \(n\) # 1 if we keep track of tail | \(n\) |
Dynamic Array Sequence
- Make an array efficient for last dynamic operations
- Python “list” is a dynamic array
- Idea! Allocate extra space so reallocation does not occur with every dynamic operation
- Fill ratio: \(0 ≤ r ≤ 1\) the ratio of items to space
- Whenever array is full ($r = 1$), allocate \(Θ(n)\) extra space at end to fill ratio \(r_i\) (e.g., 1/2)
- Will have to insert \(Θ(n)\) items before the next reallocation
- A single operation can take \(Θ(n)\) time for reallocation
- However, any sequence of \(Θ(n)\) operations takes \(Θ(n)\) time
- So each operation takes \(Θ(1)\) time “on average”
| Sequence Data Structure | API Type | Worst Case \(O(\cdot)\) | |||
|---|---|---|---|---|---|
| Array | Container | Static | Dynamic | ||
| API | build(x) |
get_at(i)set_at(i) |
insert_first(x)delete_first() |
insert_last(x)delete_last() |
insert_at(i, x)delete_at(i) |
| Dynamic Array | \(n\) | \(1\) | \(n\) | \(1_{(a)}\) | \(n\) |
Amortized Analysis
- Data structure analysis technique to distribute cost over many operations
- Operation has amortized cost \(T(n)\) if k operations cost at most \(≤ kT(n)\)
- “\(T(n)\) amortized” roughly means \(T(n)\) “on average” over many operations
- Inserting into a dynamic array takes \(Θ(1)\) amortized time
Dynamic Array Deletion
- Delete from back? \(Θ(1)\) time without effort, yay!
- However, can be very wasteful in space. Want size of data structure to stay \(Θ(n)\)
- Attempt: if very empty, resize to r = 1. Alternating insertion and deletion could be bad…
- Idea! When \(r < r_d\), resize array to ratio \(r_i\) where \(r_d < r_i\) (e.g., \(r_d = 1/4, r_i = 1/2\))
- Then \(Θ(n)\) cheap operations must be made before next expensive resize
- Can limit extra space usage to \((1 + ε)n\) for any \(ε > 0\) (set \(r_d = \frac{1}{1+\epsilon}, r_i = \frac{r_d + 1}{2}\))
- Dynamic arrays only support dynamic last operations in \(Θ(1)\) time
- Python List append and pop are amortized \(O(1)\) time, other operations can be \(O(n)\)!
- (Inserting/deleting efficiently from front is also possible; you will do this in PS1)
| Sequence Data Structure | API Type | Worst Case \(O(\cdot)\) | |||
|---|---|---|---|---|---|
| Array | Container | Static | Dynamic | ||
| API | build(x) |
get_at(i)set_at(i) |
insert_first(x)delete_first() |
insert_last(x)delete_last() |
insert_at(i, x)delete_at(i) |
| Static Array | \(n\) | \(1\) | \(n\) | \(n\) | \(n\) |
| Linked List | \(n\) | \(n\) | \(1\) | \(n\) # 1 if we keep track of tail | \(n\) |
| Dynamic Array | \(n\) | \(1\) | \(n\) | \(1_{(a)}\) | \(n\) |
3 Sorting
Notes
Set Interface
- Storing items in an array in arbitrary order can implement a (not so efficient) set
- Stored items sorted increasing by key allows:
- faster find min/max (at first and last index of array)
- faster finds via binary search: \(O(log n)\)
| Set Data Structure | API Type | Worst Case \(O(\cdot)\) | |||
|---|---|---|---|---|---|
| Set | Container | Static | Dynamic | ||
| API | build(x) |
find(k) |
insert(k)delete(k) |
find_min()find_max() |
find_prev(k)find_next(k) |
| Array | \(n\) | \(n\) | \(n\) | \(n\) | \(n\) |
| Sorted Array | \(nlogn\) | \(logn\) | \(n\) | \(1\) | \(logn\) |
- But how to construct a sorted array efficiently?
Sorting
- Given a sorted array, we can leverage binary search to make an efficient set data structure.
- Input: (static) array A of n numbers
- Output: (static) array B which is a sorted permutation of A
- Permutation: array with same elements in a different order
- Sorted:
B[i - 1]≤B[i]for all \(i ∈ {1, . . . , n}\)
- Example: \([8, 2, 4, 9, 3] → [2, 3, 4, 8, 9]\)
- A sort is destructive if it overwrites \(A\) (instead of making a new array \(B\) that is a sorted version of \(A\))
- A sort is in place if it uses \(O(1)\) extra space (implies destructive: in place ⊆ destructive)
Permutation Sort
- There are \(n!\) permutations of A, at least one of which is sorted. (Due to duplications)
- For each permutation, check whether sorted in \(Θ(n)\)
- Example: \([2, 3, 1] → {[1, 2, 3], [1, 3, 2], [2, 1, 3], [2, 3, 1], [3, 1, 2], [3, 2, 1]}\)
def permutation_sort(A):
"""Sort A"""
for B in permutations(A): # O(n!)
if is_sorted(B): # O(n)
return B
- permutation sort analysis:
- Correct by case analysis: try all possibilities (Brute Force)
- Running time: \(Ω(n! · n)\) which is exponential :(
Solving Recurrences
- Substitution: Guess a solution, replace with representative function, recurrence holds true
- Recurrence Tree: Draw a tree representing the recursive calls and sum computation at nodes
- Master Theorem: A formula to solve many recurrences (R03)
Selection Sort
- Find a largest number in prefix
A[:i + 1]and swap it toA[i] - Recursively sort prefix
A[:i] - Example: \([8, 2, 4, 9, 3], [8, 2, 4, 3, 9], [3, 2, 4, 8, 9], [3, 2, 4, 8, 9], [2, 3, 4, 8, 9]\)
def selection_sort(A, i=None):
"""Sort A[:i+1]"""
if i is None: i = len(A) - 1
if i > 0:
j = prefix_max(A, i)
A[i], A[j] = A[j], A[i]
selection_sort(A, i - 1)
def prefix_max(A, i):
"""Return index of maximum in A[:i+1]"""
if i > 0:
j = prefix_max(A, i - 1)
if A[i] < A[j]:
return j
return i
prefix_maxanalysis:- Base case: for
i = 0, array has one element, so index of max is \(i\) - Induction: assume correct for $i$, maximum is either the maximum of
A[:i]orA[i], returns correct index in either case. □ -
\[S(1) = Θ(1); S(n) = S(n - 1) + Θ(1)\]
- Substitution: \(S(n) = Θ(n)\), \(cn = Θ(1) + c(n - 1) =⇒ 1 = Θ(1)\)
- Recurrence tree: chain of \(n\) nodes with \(Θ(1)\) work per node, \(\Sigma_{i=0}^{n-1}1=Θ(n)\)
- Base case: for
Insertion Sort
- Recursively sort prefix
A[:i] - Sort prefix
A[:i + 1]assuming that prefixA[:i]is sorted by repeated swaps - Example: \([8, 2, 4, 9, 3], [2, 8, 4, 9, 3], [2, 4, 8, 9, 3], [2, 4, 8, 9, 3], [2, 3, 4, 8, 9]\)
def insertion_sort(A, i=None):
"""Sort A[:i+1]"""
if i is None: i = len(A) - 1
if i > 0:
insertion_sort(A, i-1)
insert_last(A, i)
def insert_last(A, i):
"""Sort A[:i+1] assuming sorted A[:i]"""
if i > 0 and A[i] < A[i-1]:
A[i], A[i-1] = A[i-1], A[i]
insert_last(A, i-1)
insert_lastanalysis:- Base case: for \(i = 0\), array has one element so is sorted
- Induction: assume correct for \(i\), if \(A[i] >= A[i - 1]\), array is sorted; otherwise, swapping last two elements allows us to sort
A[:i]by induction. □ - \[S(1) = Θ(1); S(n) = S(n - 1) + Θ(1) =⇒ S(n) = Θ(n)\]
insertion_sortanalysis:- Base case: for \(i = 0\), array has one element so is sorted
- Induction: assume correct for $i$, algorithm sorts
A[:i]by induction, and then insert last correctly sorts the rest as proved above. □ - \[T(1) = Θ(1); T(n) = T(n - 1) + Θ(n) =⇒ T(n) = Θ(n^2)\]
Merge Sort
- Recursively sort first half and second half (may assume power of two)
- Merge sorted halves into one sorted list (two finger algorithm)
- Example: \([7, 1, 5, 6, 2, 4, 9, 3], [1, 7, 5, 6, 2, 4, 3, 9], [1, 5, 6, 7, 2, 3, 4, 9], [1, 2, 3, 4, 5, 6, 7, 9]\)
def merge_sort(A, lo=0, hi=None):
"""Sort A[lo:hi]"""
if hi is None: hi = len(A)
if hi - lo > 1:
mid = (lo + hi + 1) // 2
merge_sort(A, lo, mid)
merge_sort(A, mid, hi)
left, right = A[lo:mid], A[mid:hi]
merge(left, right, A, len(left), len(right), lo, hi)
def merge(left, right, A, i, j, lo, hi):
"""Merge sorted left[:i] anr right[:j] into A[lo:hi]"""
if lo < hi:
if (j <= 0) or (i > 0 and left[i-1] > right[j-1]):
A[hi-1] = left[i-1]
i -= 1
else:
A[hi-1] = right[j-1]
j -= 1
merge(left, right, A, i, j, lo, hi -1)
mergeanalysis:- Base case: for \(n = 0\), arrays are empty, so vacuously correct
- Induction: assume correct for \(n\), item in
A[r]must be a largest number from remaining prefixes ofleftandright, and since they are sorted, taking largest of last items suffices; remainder is merged by induction. □ - \[S(0) = Θ(1); S(n) = S(n - 1) + Θ(1) =⇒ S(n) = Θ(n)\]
merge_sortanalysis:- Base case: for \(n = 1\), array has one element so is sorted
- Induction: assume correct for \(k < n\), algorithm sorts smaller halves by induction, and then merge merges into a sorted array as proved above. □
-
\[T(1) = Θ(1); T(n) = 2T(n/2) + Θ(n)\]
- Substitution: Guess \(T(n) = Θ(n log n)\) \(cn log n = Θ(n) + 2c(n/2)log(n/2) =⇒ cn log(2) = Θ(n)\)
- Recurrence Tree: complete binary tree with depth \(log2 n\) and \(n\) leaves, level \(i\) has \(2^i\) nodes with \(O(n/2^i )\) work each, total: \(\Sigma_{i=0}^{log_2^n}(2i )(n/2^i ) = \Sigma_{i=0}^{log_2^n}n = Θ(n log n)\)
Master Theorem
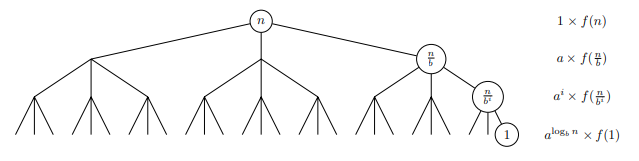
- The Master Theorem provides a way to solve recurrence relations in which recursive calls decrease problem size by a constant factor.
- Given a recurrence relation of the form \(T(n) = aT(n/b)+ f(n)\) and \(T(1) = Θ(1)\), with branching factor \(a ≥ 1\), problem size reduction factor \(b > 1\), and asymptotically non-negative function \(f(n)\), the Master Theorem gives the solution to the recurrence by comparing \(f(n)\) to \(a^{log_b^{n}}=n^{log_b^a}\) , the number of leaves at the bottom of the recursion tree.
- When \(f(n)\) grows asymptotically faster than \(n\) , the work done at each level decreases geometrically so the work at the root dominates;
- alternatively, when \(f(n)\) grows slower, the work done at each level increases geometrically and the work at the leaves dominates.
- When their growth rates are comparable, the work is evenly spread over the tree’s \(O(log n)\) levels.
| case | solution | conditions |
|---|---|---|
| 1 | \(T(n) = \Theta(n^{log_b^a})\) | \(f(n) = \Theta(n^{log_b^{a-\epsilon}})\) for some constant \(ε > 0\) |
| 2 | \(T(n) = \Theta(n^{log_b^a}log^{k+1}n)\) | \(T(n) = \Theta(n^{log_b^a}log^{k}n)\) for some constant \(k ≥ 0\) |
| 3 | \(T(n) = \Theta(f(n))\) | \(f(n) = \Theta(n^{log_b^{a+\epsilon}})\) for some constant \(ε > 0\) and \(af(n/b) < cf(n)\) for some constant \(0 < c < 1\) |
- The Master Theorem takes on a simpler form when f(n) is a polynomial, such that the recurrence has the from \(T(n) = aT(n/b) + Θ(n^c )\) for some constant \(c ≥ 0\).
| case | solution | conditions | intuition |
|---|---|---|---|
| 1 | \(T(n) = \Theta(n^{log_b^a})\) | \(c < log_b^a\) | Work done at leaves dominates |
| 2 | \(T(n) = \Theta(n^{c}log^{n})\) | \(c=log_b^a\) | Work balanced across the tree |
| 3 | \(T(n) = \Theta(n^c)\) | \(c>log_b^a\) | Work done at root dominates |
- This special case is straight-forward to prove by substitution (this can be done in recitation).
- To apply the Master Theorem (or this simpler special case), you should state which case applies, and show that your recurrence relation satisfies all conditions required by the relevant case.
- There are even stronger (more general) formulas to solve recurrences, but we will not use them in this class.
4 Hashing
Notes
Comparison Model
- In this model, assume algorithm can only differentiate items via comparisons
- Comparable items: black boxes only supporting comparisons between pairs
- Comparisons are \(<, ≤, >, ≥, =, \neq\), outputs are binary: True or False
- Goal: Store a set of n comparable items, support find(k) operation
- Running time is lower bounded by # comparisons performed, so count comparisons!
Decision Tree
- Any algorithm can be viewed as a decision tree of operations performed
- An internal node represents a binary comparison, branching either True or False
- For a comparison algorithm, the decision tree is binary (draw example)
- A leaf represents algorithm termination, resulting in an algorithm output
- A root-to-leaf path represents an execution of the algorithm on some input
- Need at least one leaf for each algorithm output, so search requires \(≥ n + 1\) leaves
Comparison Search Lower Bound
- What is worst-case running time of a comparison search algorithm?
- running time \(≥\) # comparisons \(≥\) max length of any root-to-leaf path \(≥\) height of tree
- What is minimum height of any binary tree on \(≥ n\) nodes?
- Minimum height when binary tree is complete (all rows full except last)
- \(Height ≥ \lceil lg(n + 1) \rceil - 1 = Ω(log n)\), so running time of any comparison sort is \(Ω(log n)\)S
- Sorted arrays achieve this bound! Yay!
- More generally, height of tree with \(Θ(n)\) leaves and max branching factor \(b\) is \(Ω(logb n)\)
- To get faster, need an operation that allows super-constant \(ω(1)\) branching factor. How??
Direct Access Array
- Exploit Word-RAM \(O(1)\) time random access indexing! Linear branching factor!
- Idea! Give item unique integer key k in \(\{0, . . . , u - 1\}\), store item in an array at index \(k\)
- Associate a meaning with each index of array.
- If keys fit in a machine word, i.e. \(u ≤ 2^w\), worst-case \(O(1)\) find/dynamic operations! Yay!
- 6.006: assume input numbers/strings fit in a word, unless length explicitly parameterized
- Anything in computer memory is a binary integer, or use (static) 64-bit address in memory
- But space \(O(u)\), so really bad if \(n \ll u\) … :(
- Example: if keys are ten-letter names, for one bit per name, requires \(26^{10} ≈ 17.6\) TB space
- How can we use less space?
Hashing
- Idea! If \(n \ll u\), map keys to a smaller range \(m = Θ(n)\) and use smaller direct access array
- Hash function: \(h(k) : \{0, . . . , u - 1\} → \{0, . . . , m - 1\}\) (also hash map)
- Direct access array called hash table, \(h(k)\) called the hash of key k
- If \(m \ll u\), no hash function is injective by pigeonhole principle
- Always exists keys \(a, b\) such that \(h(a) = h(b)\) \(→\) Collision! :(
- Can’t store both items at same index, so where to store? Either:
- store somewhere else in the array (open addressing)
- complicated analysis, but common and practical
- store in another data structure supporting dynamic set interface (chaining)
- store somewhere else in the array (open addressing)
Chaining
- Idea! Store collisions in another data structure (a chain)
- If keys roughly evenly distributed over indices, chain size is \(n/m = n/Ω(n) = O(1)!\)
- If chain has \(O(1)\) size, all operations take \(O(1)\) time! Yay!
- If not, many items may map to same location, e.g. \(h(k) = constant\), chain size is \(Θ(n)\) :(
- Need good hash function! So what’s a good hash function?
Hash Functions
Division (bad): \(h(k) = k \ \mod \ m\)
- Heuristic, good when keys are uniformly distributed!
- $m$ should avoid symmetries of the stored keys
- Large primes far from powers of 2 and 10 can be reasonable
- Python uses a version of this with some additional mixing
- If \(u \ll n\), every hash function will have some input set that will a create \(O(n)\) size chain
- Idea! Don’t use a fixed hash function! Choose one randomly (but carefully)!
Universal (good, theoretically): \(h_{ab}{(k)}=(((ak+b) \mod \ p) \mod \ m)\)
-
Hash Family $$\mathcal{H}(p,m) = {h_{ab} a,b \in {0,…,p-1} and a \neq 0 }$$ - Parameterized by a fixed prime \(p > u\), with \(a\) and \(b\) chosen from range \(\{0,...,p-1\}\)
- \(\mathcal{H}\) is a Universal family: \(\underset{h\in\mathcal{H}}{Pr}\{h(k_i) = h(k_j)\} \leq 1/m \qquad \forall k_i \neq k_j \in \{0,...,u-1\}\)
- Why is universality useful? Implies short chain lengths! (in expectation)
- \(X_{ij}\) indicator random variable over \(h \in \mathcal{H}: \ X_{ij}=1 \ if \ h(k_i) = h(k_j), X_{ij} = 0 \ otherwise\)
- Size of chain at index \(h(k_i)\) is random variable \(X_i = \Sigma_{j}{X_{ij}}\)
- Expected size of chain at index \(h(k_i)\):
- Since \(m = Ω(n)\), load factor \(α = n/m = O(1)\), so \(O(1)\) in expectation!
Dynamic
- If \(n/m\) far from 1, rebuild with new randomly chosen hash function for new size m
- Same analysis as dynamic arrays, cost can be amortized over many dynamic operations
- So a hash table can implement dynamic set operations in expected amortized O(1) time! :)
| Data Structure | API Type | Worst Case \(O(\cdot)\) | |||
|---|---|---|---|---|---|
| Set | Container | Static | Dynamic | ||
| API | build(x) |
find(k) |
insert(k)delete(k) |
find_min()find_max() |
find_prev(k)find_next(k) |
| Array | \(n\) | \(n\) | \(n\) | \(n\) | \(n\) |
| Sorted Array | \(nlogn\) | \(logn\) | \(n\) | \(1\) | \(logn\) |
| Direct Access Array | \(u\) | \(1\) | \(1\) | \(u\) | \(u\) |
| Hash Table | \(n_{(e)}\) | \(1_{e}\) | \(1_{(a)(e)}\) | \(n\) | \(n\) |
5 Linear Sorting
Notes
Comparison Sort Lower Bound
- Comparison model implies that algorithm decision tree is binary (constant branching factor)
- Requires # leaves L ≥ # possible outputs
- Tree height lower bounded by $Ω(log L)$, so worst-case running time is $Ω(log L)$
- To sort array of n elements, # outputs is n! permutations
- Thus height lower bounded by $log(n!) ≥ log((n/2)^{n/2}) = Ω(n log n) $
- So merge sort is optimal in comparison model
- Can we exploit a direct access array to sort faster?
Direct Access Array Sort
- Example: $[5, 2, 7, 0, 4]$
- Suppose all keys are unique non-negative integers in range ${0, . . . , u - 1}$, so $n ≤ u$
- Insert each item into a direct access array with size \(u\) in $Θ(n)$
- Return items in order they appear in direct access array in $Θ(u)$
- Running time is $Θ(u)$, which is $Θ(n)$ if $u = Θ(n)$. Yay!
def direct_access_sort(A):
"""Sort A assuming items have distinct non-negative keys."""
u = 1 + max([x.key for x in A])
D = [None] * u
for x in A:
D[x.key] = x
i = 0
for key in range(u):
if D[key] is not None:
A[i] = D[key]
i += 1
- What if keys are in larger range, like $u = Ω(n^2) < n^2$?
- Idea! Represent each key $k$ by tuple $(a, b)$ where $k = an + b$ and $0 ≤ b < n$
- Specifically $a = \lfloor k/n\rfloor < n$ and $b = (k \mod n)$ (just a 2-digit base-n number!)
- This is a built-in Python operation $(a, b) = divmod(k, n)$
- Example: $[17, 3, 24, 22, 12] ⇒ [(3,2), (0,3), (4,4), (4,2), (2,2)] ⇒ [32, 03, 44, 42, 22]_{(n=5)}$
- How can we sort tuples?
Tuple Sort
- Item keys are tuples of equal length, i.e. item $x.key = (x.k_1, x.k_2, x.k_3, . . .)$.
- Want to sort on all entries lexicographically, so first key $k_1$ is most significant
- How to sort? Idea! Use other auxiliary sorting algorithms to separately sort each key
- (Like sorting rows in a spreadsheet by multiple columns)
- What order to sort them in? Least significant to most significant!
- Exercise: $[32, 03, 44, 42, 22] =⇒ [42, 22, 32, 03, 44] =⇒ [03, 22, 32, 42, 44]_{(n=5)}$
- Idea! Use tuple sort with auxiliary direct access array sort to sort tuples (a, b).
- Problem! Many integers could have the same a or b value, even if input keys distinct
- Need sort allowing repeated keys which preserves input order
- Want sort to be stable: repeated keys appear in output in same order as input
- Direct access array sort cannot even sort arrays having repeated keys!
- Can we modify direct access array sort to admit multiple keys in a way that is stable?
Counting Sort
- Instead of storing a single item at each array index, store a chain, just like hashing!
- For stability, chain data structure should remember the order in which items were added
- Use a sequence data structure which maintains insertion order
- To insert item
x,insert_lastto end of the chain at index $x.key$ - Then to sort, read through all chains in sequence order, returning items one by one
def counting_sort(A):
"""Sort A assuming items have non-negative keys."""
u = 1 + max([x.key for x in A])
D = [[] for i in range(u)]
for x in A:
D[x.key].append(x)
i = 0
for chain in D:
for x in chain:
A[i] = x
i += 1
Radix Sort
- Idea! If $u < n^2$, use tuple sort with auxiliary counting sort to sort tuples (a, b)
- Sort least significant key b, then most significant key a
- Stability ensures previous sorts stay sorted
- Running time for this algorithm is $O(2n) = O(n)$. Yay!
- If every $key < n^c$ for some positive $c = logn(u)$, every key has at most $c$ digits base \(n\)
- A c-digit number can be written as a c-element tuple in $O(c)$ time
- We sort each of the c base-n digits in $O(n)$ time
- So tuple sort with auxiliary counting sort runs in $O(cn)$ time in total
- If c is constant, so each key is $≤ n^c$ , this sort is linear $O(n)$!
def radix_sort(A):
"""Sort A assuming items have non-negative keys"""
n = len(A)
u = 1 + max([x.key for x in A])
c = 1 + (u.bit_length() // n.bit_length())
class Obj: pass
D = [Obj() for a in A]
for i in range(n):
D[i].digits = []
D[i].item = A[i]
high = A[i].key
for j in range(c):
high, low = divmod(high, n)
D[i].digits.append(low)
for i in range(c):
for j in range(n):
D[j].key = D[j].digits[i]
counting_sort(D)
for i in range(n);
A[i] = D[i].item
| Algorithm | Time $O(\cdot)$ | In-place? | Stable? | Comments |
|---|---|---|---|---|
| Insertion Sort | $n^2$ | Y | Y | $O(nk)$ for k-proximate |
| Selection Sort | $n^2$ | Y | N | $O(n)$ swaps |
| Merge Sort | \(nlogn\) | N | Y | stable, optimal comparison |
| Counting Sort | $n + u$ | N | Y | $O(n)$ when $u = O(n)$ |
| Radix Sort | $n + nlog_n{u}$ | N | Y | $O(n)$ when $u = O(n)$ |
6 Binary Trees, Part 1
Notes
| Sequence Data Structure | API Type | Worst Case $O(\cdot)$ | |||
|---|---|---|---|---|---|
| Array | Container | Static | Dynamic | ||
| API | build(x) |
get_at(i)set_at(i) |
insert_first(x)delete_first() |
insert_last(x)delete_last() |
insert_at(i, x)delete_at(i) |
| Static Array | \(n\) | \(1\) | \(n\) | \(n\) | \(n\) |
| Linked List | \(n\) | \(n\) | \(1\) | \(n\) # 1 if we keep track of tail | \(n\) |
| Dynamic Array | \(n\) | \(1\) | \(n\) | $1_{(a)}$ | \(n\) |
| Goal | \(n\) | \(logn\) | \(logn\) | \(logn\) | \(logn\) |
| Set Data Structure | API Type | Worst Case $O(\cdot)$ | |||
|---|---|---|---|---|---|
| Set | Container | Static | Dynamic | ||
| API | build(x) |
find(k) |
insert(k)delete(k) |
find_min()find_max() |
find_prev(k)find_next(k) |
| Array | \(n\) | \(n\) | \(n\) | \(n\) | \(n\) |
| Sorted Array | \(nlogn\) | \(logn\) | \(n\) | \(1\) | \(logn\) |
| Goal | \(nlogn\) | \(logn\) | \(logn\) | \(logn\) | \(logn\) |
How? Binary Trees!
- Pointer-based data structures (like Linked List) can achieve worst-case performance
- Binary tree is pointer-based data structure with three pointers per node
- Node representation:
node.{item, parent, left, right} - Example:

class TreeNode:
def __init__(self, x):
self.item = x
self.left = None
self.right = None
self.parent = None
Terminology
- The root of a tree has no parent (Ex:
<A>) - leaf of a tree has no children (Ex:
<C>,<E>, and<F>) - Define
depth(<X>)of node<X>in a tree rooted at<A>to be length of path from<A>to<X> - Define
height(<X>)of node<X>to be max depth of any node in the subtree rooted at<X> - Idea: Design operations to run in $O(h)$ time for root height $h$, and maintain $h = O(log n)$
- A binary tree has an inherent order: its traversal order (In-order traversal)
- every node in node
<X>’s left subtree is before<X> - every node in node
<X>’s right subtree is after<X>
- every node in node
def subtree_iter(A):
if A.left: yield from A.left.subtree_iter()
yield A
if A.right: yield from A.right.subtree_iter()
- List nodes in traversal order via a recursive algorithm starting at root:
- Recursively list left subtree, list self, then recursively list right subtree
- Runs in $O(n)$ time, since $O(1)$ work is done to list each node
- Example: Traversal order is (
<F>,<D>,<B>,<E>,<A>,<C>)
- Right now, traversal order has no meaning relative to the stored items
- Later, assign semantic meaning to traversal order to implement Sequence/Set interfaces
Tree Navigation
- Find first node in the traversal order of node
<X>’s subtree (last is symmetric)- Otherwise,
<X>is the first node, so return it - Running time is $O(h)$ where h is the height of the tree
- Example: first node in
<A>’s subtree is<F>
- Otherwise,
def subtree_first(A):
if A.left: return A.left.subtree_first()
return A
def subtree_last(A):
if A.right: return A.right.subtree_last()
return A
- Find successor of node
<X>in the traversal order (predecessor is symmetric)- If
<X>has right child, return first of right subtree - Otherwise, return lowest ancestor of
<X>for which<X>is in its left subtree - Running time is $O(h)$ where $h$ is the height of the tree
- Example: Successor of:
<B>is<E>,<E>is<A>, and<C>is None.
- If
def successor(A):
if A.right: return A.right.subtree_first()
while A.parent and (A is A.parent.right):
A = A.parent
return A.parent
def predecessor(A):
if A.left: return A.left.subtree_last()
while A.parent and (A is A.parent.left):
A = A.parent
return A.parent
Dynamic Operations
- Change the tree by a single item (only add or remove leaves):
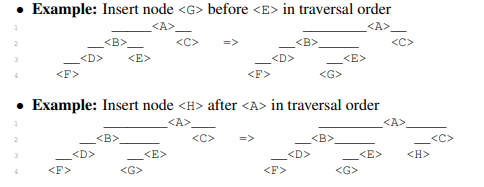
- add a node after another in the traversal order (before is symmetric)
- remove an item from the tree
- Insert node
<Y>after<X>in the traversal order- If
<X>has no right child, make<Y>the right child of<X> - Otherwise, make
<Y>the left child of<X>’s successor (which cannot have a left child) - Running time is $O(h)$ where $h$ is the height of the tree
- If
def subtree_insert_before(A, B):
if A.left:
A = A.left.subtree_last()
A.right, B.parent = B, A
else:
A.left, B.parent = B, A
def subtree_insert_after(A, B):
if A.right:
A = A.right.subtree_first()
A.left, B.parent = B, A
else:
A.right, B.parent = B, A
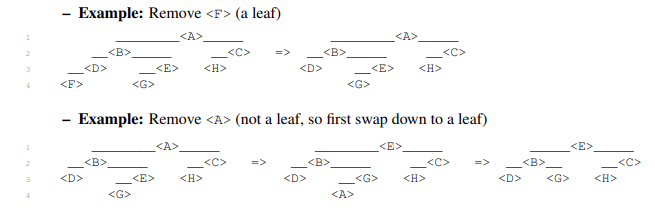
- Delete the item in node
<X>from<X>’s subtree- If
<X>is a leaf, detach from parent and return - Otherwise,
<X>has a child- If
<X>has a left child, swap items with the predecessor of<X>and recurse - Otherwise
<X>has a right child, swap items with the successor of<X>and recurse
- If
- Running time is $O(h)$ where $h$ is the height of the tree
- If
def subtree_delete(A):
if A.left or A.right: # A is a leaf node
if A.left: B = A.predecessor()
else: B = A.successor()
A.item, B.item = B.item, A.item
if A.parent: # A is not a leaf node
if A.parent.left is A: A.parent.left = None
else: A.parent.right = None
return A
Application: Set
- Idea! Set Binary Tree (a.k.a Binary Search Tree / BST)
- Traversal order(In-order) is sorted order increasing by key
- Equivalent to BST Property: for every node, every key in left subtree $\leq$ node’s key $\leq$ every key in right subtree
- Then can find the node with key $k$ in node
<X>’s subtree in $O(h)$ time like binary search:- If $k$ is smaller than the key at
<X>, recurse in left subtree (or return None) - If $k$ is larger than the key at
<X>, recurse in right subtree (or return None) - Otherwise, return the item stored at
<X>
- If $k$ is smaller than the key at
- Other Set operations follow a similar pattern
class BSTNode(TreeNode):
def subtree_find(A, k):
if k == A.item.key: return A
if k < A.item.key and A.left: return A.left.subtree_find(k)
if k > A.item.key and A.right: return A.right.subtree_find(k)
def subtree_find_next(A, k):
if A.item.key <= k:
if A.right: return A.right.subtree_find_next(k)
else: return None
if A.item.key > k:
if A.left:
B = A.left.subtree_find_next(k)
if B: return B
return A
def subtree_find_prev(A, k):
if A.item.key >= k:
if A.left: return A.left.subtree_find_prev(k)
else: return None
if A.item.key < k:
if A.right:
B = A.right.subtree_find_prev(k)
if B: return B
return A
def subtree_insert(A, B):
if B.item.key < A.item.key:
if A.left: A.left.subtree_insert(B)
else: A.subtree_insert_before(B)
elif B.item.key > A.item.key:
if A.right: A.right.subtree_insert(B)
else: A.subtree_insert_after(B)
else: A.item = B.item
class BinaryTree:
def __init__(self, node_type=BinaryNode):
self.root = None
self.size = 0
self.node_type = node_type
def __len__(self): return self.size
def __iter__(self):
if self.root:
for item in self.root.subtree_iter():
yield node.item
class BinaryTreeSet(BinaryTree):
def __init__(self):
super().__init__(node_type=BSTNode)
def iter_order(self): yield from self
def build(self, X):
for x in X: self.insert(x)
def find_min(self):
if self.root: return self.root.subtree_first().item
def find_max(self):
if self.root: return self.root_subtree_last().item
def find(self, k):
if self.root:
node = self.root.subtree_find(k)
if node: return node.item
def find_next(self, k):
if self.root:
node = self.root.subtree_find_next(k)
if node: return node.item
def find_prev(self, k):
if self.root:
node = self.root.subtree_find_prev(k)
if node: return node.item
def insert(self, x):
new_node = self.node_type(x)
if self.root:
self.root.subtree_insert(new_node)
if new_node.parent is None: return False
else:
self.root = new_node
self.size += 1
def delete(self, k):
assert self.root
node = self.root.subtree_find(k)
assert node
ext = node.subtree_delete()
if ext.parent is None: self.root = None
self.size -= 1
return ext.item
Application: Sequence
- Idea! Sequence Binary Tree: Traversal order is sequence order
- How do we find $i^th$ node in traversal order of a subtree? Call this operation
subtree_at(i) - Could just iterate through entire traversal order, but that’s bad, $O(n)$
- However, if we could compute a subtree’s size in $O(1)$, then can solve in $O(h)$ time
- How? Check the size $n_L$ of the left subtree and compare to $i$
- If $i < n_L$, recurse on the left subtree
- If $i > n_L$, recurse on the right subtree with $i’ = i - n_L - 1$
- Otherwise, $i = n_L$, and you’ve reached the desired node!
- Maintain the size of each node’s subtree at the node via augmentation
- Add
node.sizefield to eachnode - When adding new leaf, add $+1$ to
a.sizefor all ancestors a in $O(h)$ time - When deleting a leaf, add $-1$ to
a.sizefor all ancestors a in $O(h)$ time
- Add
- Sequence operations follow directly from a fast
subtree_at(i)operation - Naively,
build(X)takes $O(nh)$ time, but can be done in $O(n)$ time; see recitation
7 Binary Tree II: AVL
Notes
Height Balance
- How to maintain height $h=O(logn)$ where \(n\) is number of nodes in tree?
- A binary tree that maintains $O(logn)$ height under dynamic operations is called balanced
- There are many balancing schemes (Red-Black Trees, Splay Trees, 2-3 Trees, …)
- First proposed balancing scheme was the AVL Tree(Adelson-Velsky and Landis, 1962)
Rotations
-
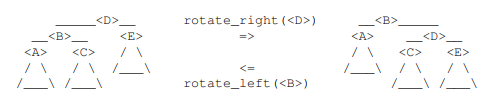
Need to reduce height of tree without changing its traversal order, so that we represent the same sequence of items.
-
How to change the structure of a tree, while preserving traversal order? Rotations!
-
A rotation relinks $O(1)$ pointers to modify tree structure and maintains traversal order
def subtree_rotate_right(D):
assert D.left
B, E = D.left, D.right
A, C = B.left, B.right
# make sure new B has the right connection to D's parent
D, B = B, D
D.item, B.item = D.item, B.item
B.left, B.right = A, D
D.left, D.right = C, E
if A: A.parent = B
if E: E.parent = D
def subtree_rotate_left(B):
assert B.right
A, D = B.left, B.right
C, E = D.left, D.right
B, D = D, B
B.item, D.item = D.item, B.item
D.left, D.right = B, E
B.left, B.right = A, C
if A: A.parent = B
if E: E.parent = D
Rotations Suffice
- Claim: $O(n)$ rotations can transform a binary tree to any other with same traversal order
- Proof: Repeatedly perform last possible right rotation in traversal order; resulting tree is a canonical chain. Each rotation increases depth of the last node by 1. Depth of last node in final chain is $n - 1$, so at most $n-1$ rotations are performed. Reverse canonical rotations to reach target tree. Q.E.D
- Can maintain height-balance by using $O(n)$ rotations to fully balance the tree, but slow :(
- We will keep the tree balanced in $O(logn)$ time per operation!
AVL Trees: Height Balance
- AVL trees maintain height-balance (also called the AVL property)
- A node is height-balanced if heights of its left and right subtree differ by at most 1
- Let skew of a node be the height of its right subtree minus that of its left subtree
- Then a node is height-balanced if its skew is $-1,0$ or \(1\)
-
Claim: A binary tree with height-balanced nodes has height $h=O(logn)$ (i.e., $n=2^{\Omega(h)}$)
-
Proof: Suffices to show fewest nodes $F(h)$ in any height $h$ tree is $F(h)=2^{\Omega(h)}$ \(F(0) = 1, F(1)=2, F(h)=1+F(h-1)+F(h-2)\geq 2F(h-2))\implies F(h)\geq 2^{h/2}\qquad \square\)
-
Suppose adding or removing leaf from a height-balanced tree results in imbalance
- Only subtree of the leaf’s ancestors have changed in height or skew
- Heights changed by only $\pm 1$, so skews still have magnitude $\leq 2$
- Idea: Fix height-balance of ancestors starting from leaf up to the root
- Repeatedly rebalanced lowest ancestor that is not height-balanced, wlog assume skew 2
- Local Rebalance: Given binary tree node
<B>:- whose skew 2 and
- every other node in
<B>’s subtree is height-balanced - then
<B>’s subtree can be made height-balanced via one or two rotations - (after which
<B?’s height is the same or one less than before)
- Proof:
- Since skew of
<B>is 2,<B>?’s right child exists - Case 1: skew of
<F>is 0 or Case 2: skew of<F>is 1- Perform a left rotation on
<B>
- Perform a left rotation on
- Since skew of
TBC
Computing Height
- How to tell whether node is height-balanced? Compute heights of subtrees!
- How to compute the height of node
<X>? Naive algorithm:- Recursively compute height of the left and right subtrees of
<X> - Add \(1\) to the max of the two heights
- Runs in $Ω(n)$ time, since we recurse on every node :(
- Recursively compute height of the left and right subtrees of
- Idea: Augment each node with the height of its subtree! (Save for later!)
- Height of
<X>can be computed in $O(1)$ time from the heights of its children:- Look up the stored heights of left and right subtrees in $O(1)$ time
- Add \(1\) to the max of the two heights
- During dynamic operations, we must maintain our augmentation as the tree changes shape
- Recompute subtree augmentations at every node whose subtree changes:
- Update relinked nodes in a rotation operation in $O(1)$ time (ancestors don’t change)
- Update all ancestors of an inserted or deleted node in $O(h)$ time by walking up the tree
Steps to Augment a Binary Tree
- In general, to augment a binary tree with a subtree property P, you must:
- State the subtree property
P(<X>)you want to store at each node<X> - Show how to compute
P(<X>)from the augmentations of<X>’s children in $O(1)$ time - Then stored property
P(<X>)can be maintained without changing dynamic operation costs
- State the subtree property
Application: Sequence
- For sequence binary tree, we needed to know subtree sizes
- For just inserting/deleting a leaf, this was easy, but now need to handle rotations
- Subtree size is a subtree property, so can maintain via augmentation
- Can compute size from sizes of children by summing them and adding 1
Conclusion
- Set AVL trees achieve $O(log n)$ time for all set operations
- except $O(n log n)$ time for build and $O(n)$ time for iter
- Sequence AVL trees achieve $O(log n)$ time for all sequence operations
- except $O(n)$ time for build and iter
Application: Sorting
- Any Set data structure defines a sorting algorithm: build (or repeatedly insert) then iter
- For example, Direct Access Array Sort from Lecture 5
- AVL Sort is a new $O(n log n)$ time sorting algorithm
8 Binary Heaps
Notes
Priority Queue Interface
-
Keep track of many items, quickly access/remove the most important
- Example: router with limited bandwidth, must prioritize certain kinds of messages
- Example: process scheduling in operating system kernels
- Example: discrete-event simulation (when is next occurring event?)
- Example: graph algorithms (later in the course)
-
Order items by key = priority so Set interface (not Sequence interface)
-
Optimized for a particular subset of Set operations:
Operation Specification build(X)build priority queue from iterable X insert(x)add item x to data structure delete_max()remove and return stored item with largest key find_max()return stored item with largest key - (Usually optimized for max or min, not both)
- Focus on
insertanddelete_maxoperations:buildcan repeatedlyinsert;find_max()caninsert(delete_min())
class PriorityQueue:
def __init__(self):
self.A = []
def insert(self, x):
self.A.append(x)
def delete_max(self):
assert len(self.A) > 0
return self.A.pop() # not correct by it self.
@classmethod
def sort(PQ, A):
pq = PQ()
for x in A: pq.insert(x)
out = [pq.delete_max() for _ in A]
return reversed(out)
Priority Queue Sort
- Any priority queue data structure translates into a sorting algorithm:
build(A), e.g., insert items one by one in input order- Repeatedly
delete_min()(ordelete_max()) to determine (reverse) sorted order
- All the hard work happens inside the data structure
- Running time is $T_{build} + n · T_{delete_max} ≤ n · T_{insert} + n · T_{delete_max}$
- Many sorting algorithms we’ve seen can be viewed as priority queue sort:
| Priority Queue Data Structure | Operations $O(\cdot)$ | Priority Queue Sort | Algorithm | |||
|---|---|---|---|---|---|---|
build(A) |
insert(x) |
delete_max() |
Time | In-place? | ||
| Dynamic Array | \(n\) | $1_{(a)}$ | \(n\) | $n^2$ | Y | Selection Sort |
| Sorted Dynamic Array | \(nlogn\) | \(n\) | $1_{(a)}$ | $n^2$ | Y | Insertion Sort |
| Set AVL Tree | \(nlogn\) | \(logn\) | \(logn\) | \(nlogn\) | N | AVL Sort |
| Goal | \(n\) | $logn_{(a)}$ | $logn_{(a)}$ | \(nlogn\) | Y | Heap Sort |
Priority Queue: Set AVL Tree
- Set AVL trees support
insert(x),find_min(),find_max(),delete_min(), anddelete_max()in $O(log n)$ time per operation - So priority queue sort runs in $O(n log n)$ time
- This is (essentially) AVL sort from Lecture 7
- Can speed up
find_min()andfind_max()to $O(1)$ time via subtree augmentation - But this data structure is complicated and resulting sort is not in-place
- Is there a simpler data structure for just priority queue, and in-place $O(n lg n)$ sort? YES, binary heap and heap sort
- Essentially implement a Set data structure on top of a Sequence data structure (array), using what we learned about binary trees
Priority Queue: Array
- Store elements in an unordered dynamic array
insert(x): append x to end in amortized $O(1)$ timedelete_max(): find max in $O(n)$, swap max to the end an d removeinsertis quick, butdelete_maxis slow- Priority queue sort is selection sort! (plus some copying)
class PQArray(PriorityQueue):
def delete_max(self): # O(n)
n, A, m = len(self.A), self.A, 0
for i in range(1, n):
m = i if A[m].key < A[i].key else m
A[m], A[n] = A[n], A[m]
return super().delete_max() # pop from end
We use *args to allow insert to take one argument (as makes sense now) or zero arguments; we will need the latter functionality when making the priority queues in-place.
Priority Queue: Sorted Array
- Store elements in a sorted dynamic array
insert(x): appendxto end, swap down to sorted position in $O(n)$ time- ` delete_max()`: delete from end in $O(1)$ amortized
delete_maxis quick, butinsertis slow- Priority queue sort is insertion sort! (plus some copying)
- Can we find a compromise between these two array priority queue extremes?
class PQSortedArray(PriorityQueue):
def insert(self, x=None):
if x is not None: super().insert(x)
i, A = len(self.A) - 1, self.A
while 0 < i and A[i+1].key < A[i].key:
A[i+1], A[i] = A[i], A[i+1]
i -= 1
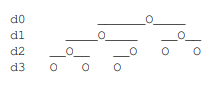
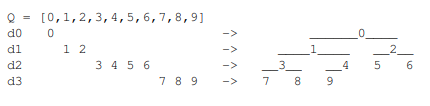
Array as a Complete Binary Tree
- Idea: interpret an array as a complete binary tree, with maximum $2^i$ nodes at depth $i$ except at the largest depth, where all nodes are left-aligned
- Equivalently, complete tree is filled densely in reading order: root to leaves, left to right
- Perspective: bijection between arrays and complete binary trees
- Height of complete tree perspective of array of \(n\) item is $\lceil log n \rceil$, so balanced binary tree
Implicit Complete Tree
- Complete binary tree structure can be implicit instead of storing pointers
- Root is at index 0
- Compute neighbors by index arithmetic:
Binary Heaps
- Idea: keep larger elements higher in tree, but only locally
- Max-Heap Property at node $i: Q[i] ≥ Q[j] for j ∈ {left(i),right(i)}$
- Max-heap is an array satisfying max-heap property at all nodes
- Claim: In a max-heap, every node i satisfies $Q[i] ≥ Q[j]$ for all nodes $j$ in
subtree(i) - Proof:
- Induction on $d = depth(j) - depth(i)$
- Base case: $d = 0$ implies $i = j$ implies $Q[i] ≥ Q[j]$ (in fact, equal)
- $depth(parent(j)) - depth(i) = d - 1 < d$, so $Q[i] ≥ Q[parent(j)]$ by induction
- $Q[parent(j)] ≥ Q[j]$ by Max-Heap Property at
parent(j)
- In particular, max item is at root of max-heap
def parent(i):
p = (i - 1) // 2
return p if 0 < i else i
def left(i, n):
l = 2 * i + 1
return l if l < n else i
def right(i, n):
r = 2 * i + 2
return r if r < n else i
Heap Insert
- Append new item $x$ to end of array in $O(1)$ amortized, making it next leaf $i$ in reading order
max_heapify_up(i): swap with parent until Max-Heap Property- Check whether $Q[parent(i)] \geq Q[i]$ (part of Max-Heap Property at parent(i))
- If not, swap items $Q[i]$ and $Q[parent(i)]$, and recursively
max_heapify_up(parent(i))
- Correctness:
- Max-Heap Property guarantees all nodes $\geq$ descendants, except $Q[i]$ might be > some of its ancestors (unless $i$ is the root, so we’re done)
- If swap is necessary, same guarantee is true with $Q[parent(i)]$ instead of $Q[i]$
- Running time: height of tree, so $\Theta(\log n)$
Heap Delete Max
- Can only easily remote last element from dynamic array, but max key is in root of tree
- So swap item at root node $i = 0$ with last item at node $n-1$ in heap array
max_heapify_down(i): swap root with larger child until Max-Heap Property- Check whether $Q[i] \geq Q[j] \ for \ j \in {left(i), right(i)}$ (Max-Heap Property at i)
- If not, swap $Q[i]$ with $Q[j]$ for child $j \ \in {left(i), right(i)}$ with maximum key, and recursively
max_heapify_down(j)
- Correctness:
- Max-Heap Property guarantees all nodes $\geq$ descendants, except $Q[i]$ might be < some descendants (unless $i$ is a leaf, so we’re done)
- If swap is necessary, same guarantee is true with $Q[j]$ instead of $Q[i]$
- Running time: height of tree, so $\Theta(\log n)$
class PQHeap(PriorityQueue):
def insert(self, x=None):
if x: super().insert(x)
n, A = self.n, self.A
max_heapify_up(A, n, n-1)
def delete_max(self):
n, A = self.n, self.A
A[0], A[n] = A[n], A[0]
max_heapify_down(A, n, 0)
return super().delete_max()
def max_heapify_up(A, n, c):
p = parent(c)
if A[p].key < A[c].key:
A[c], A[p] = A[p], A[c]
max_heapify_up(A, n, p)
def max_heapify_down(A, n, p):
l, r = left(p, n), right(p, n)
c = l if A[r].key < A[l].key else r
if A[p].key < A[c].key:
A[c], A[p] = A[p], A[c]
max_heapify_down(A, n, c)
Heap Sort
- Plugging max-heap into priority queue sort gives us a new sorting algorithm
- Running time is $O(n log n)$ because each
insertanddelete_maxtakes $O(log n)$ - But often include two improvements to this sorting algorithm:
In-place Priority Queue Sort
-
Max-heap $Q$ is a prefix of a larger array $A$, remember how many items $ Q $ belong to heap -
$ Q $ is initially zero, eventually $ A $ (after inserts), then zero again (after deletes) -
insert()absorbs next item in array at index $Q $ into heap -
delete_max()moves max item to end, then abandons it by decrementing $Q $ - In-place priority queue sort with Array is exactly Selection Sort
- In-place priority queue sort with Sorted Array is exactly Insertion Sort
- In-place priority queue sort with binary Max Heap is Heap Sort
class PriorityQueue:
def __init__(self, A):
self.n, self.A = 0, A
def insert(self):
assert self.n < len(self.A)
self.n += 1
def delete_max(self):
assert self.n >= 1
self.n -= 1
@classmethod
def sort(Queue, A):
pq = Queue(A)
for i in range(len(A)): pq.insert()
for i in range(len(A)): pq.delete_max()
return pq.A
Linear Build Heap
-
Inserting \(n\) items into heap call
max_heapify_up(i)for $i$ from $0$ to $n-1$ (root down): \(worst-case \ swaps \approx \Sigma_{i=0}^{n-1}depth(i)=\Sigma_{i=0}^{n-1}logi=log(n!)\geq(n/2)log(n/2)=\Omega(nlogn)\) -
Idea! Treat full array as a complete binary tree from start, then
max_heapify_down(i)for i from $n-1$to $0$ (leaves up): \(worst-case \ swaps \approx \Sigma_{i=0}^{n-1}height(i)=\Sigma_{i=0}^{n-1}(logn -logi)=log(\frac{n^n}{n!})=\Theta(log(\frac{n^n}{\sqrt{n}(n/e)^n}))=O(n)\) -
So can
buildheap in $O(n)$ time -
(Doesn’t speed up $O(nlogn)$ performance of heap sort)
def build_max_heap(A):
n = len(A)
for i in range(n // 2, -1, -1):
max_heapify_down(A, n, i)
Sequence AVL Tree Priority Queue
- Where else have we seen linear build time for an otherwise logarithmic data structure? Sequence AVL Tree!
- Store items of priority queue in Sequence AVL Tree in arbitrary order (insertion order)
- Maintain max (and/or min) augmentation:
node.max= pointer to node in subtree ofnodewith maximum key- This is a subtree property, so constant factor overhead to maintain
find_min()andfind _max()in $O(1)$ timedelete_min()anddelete_max()in $O(log n)$ timebuild(A)in $O(n)$ time- Same bounds as binary heaps (and more)
Set vs. Multiset
- While our Set interface assumes no duplicate keys, we can use these Sets to implement Multisets that allow items with duplicate keys:
- Each item in the Set is a Sequence (e.g., linked list) storing the Multiset items with the same key, which is the key of the Sequence
- In fact, without this reduction, binary heaps and AVL trees work directly for duplicate-key items (where e.g.
delete_maxdeletes some item of maximum key), taking care to use ≤ constraints (instead of < in Set AVL Trees)
9 Breadth-First Search
Notes
Graph Applications
- Why? Graphs are everywhere!
- any network system has direct connection to graphs
- e.g., road networks, computer networks, social networks
- the state space of any discrete system can be represented by a transition graph
- e.g., puzzle & games like Chess, Tetris, Rubik’s cube
- e.g., application workflows, specifications
Graph Definitions
- Graph $G = (V, E)$ is a set of vertices \(V\) and a set of pairs of vertices $E \subseteq V \times X$
- Directed edges are ordered pairs, e.g., $(u, v)$ for $u, v \in V$
- Undirected edges are unordered pairs, ${u, v}$ for $u, v \in V$ i.e., $(u, v)$ and $(v, u)$
- In this class, we assume all graphs are simple:
- edges are distinct, e.g., $(u, v)$ only occurs once in E (though $(v, u)$ may appear), and
- edges are pairs of distinct vertices, e.g., $u \neq v$ for all $(u, v) ∈ E$
- Simple implies $\vert E \vert = O(\vert V \vert ^2)$, since $\vert E \vert ≤ \big(\frac{\vert V \vert }{2}\big)$for undirected, $≤ 2 \big(\frac{\vert V \vert }{2}\big)$ for directed
Neighbor Sets/Adjacencies
-
The outgoing neighbor set of $u ∈ V$ is $Adj^+(u) = {v ∈ V (u, v) ∈ E} $ -
The incoming neighbor set of $u ∈ V$ is $Adj^-(u) = {v ∈ V (v, u) ∈ E}$ -
The out-degree of a vertex $u ∈ V$ is $deg^+(u) = Adj^+(u) $ -
The in-degree of a vertex $u ∈ V$ is $deg^-(u) = Adj^-(u) $ - For undirected graphs, $Adj^-(u) = Adj^+(u)$ and $deg^-(u) = deg^+(u)$
- Dropping superscript defaults to outgoing, i.e., $Adj(u) = Adj^+(u)$ and $deg(u) = deg^+(u)$
Graph Representations
- To store a graph $G = (V, E)$, we need to store the outgoing edges $Adj(u)$ for all $u ∈ V$
- First, need a Set data structure $Adj$ to map \(u\) to $Adj(u)$
- Then for each \(u\), need to store $Adj(u)$ in another data structure called an adjacency list
- Common to use direct access array or hash table for $Adj$, since want lookup fast by vertex
- Common to use array or linked list for each $Adj(u)$ since usually only iteration is needed
- For the common representations, $Adj$ has size $Θ(\vert V \vert )$, while each $Adj(u)$ has size $Θ(deg(u))$
-
Since $\Sigma_{u∈V} deg(u) ≤ 2\vert E \vert $ by handshaking lemma, graph storable in $Θ( V + \vert E \vert ) $ space -
Thus, for algorithms on graphs, linear time will mean $Θ( V + \vert E \vert )$ (linear in size of graph)
Paths
- A path is a sequence of vertices $p = (v_1, v_2, . . . , v_k)$ where $(v_i, v_{i+1}) ∈ E$ for all $1 ≤ i < k$.
- A path is simple if it does not repeat vertices
- The length $\mathcal{l}(p)$ of a path $p$ is the number of edges in the path
- The distance $δ(u, v)$ from $u ∈ V$ to $v ∈ V$ is the minimum length of any path from \(u\) to \(v\)
- i.e., the length of a shortest path from \(u\) to \(v\)
- (by convention, $δ(u, v) = ∞$ if \(u\) is not connected to \(v\))
Graph Path Problems
- There are many problems you might want to solve concerning paths in a graph:
- SINGLE_PAIR_REACHABILITY(G, s, t): is there a path in $G$ from $s ∈ V$ to $t ∈ V$ ?
- SINGLE_PAIR_SHORTEST_PATH(G, s, t): return distance $δ(s,t)$, and a shortest path in $G = (V, E)$ from $s ∈ V$ to $t ∈ V$
- SINGLE_SOURCE_SHORTEST_PATHS(G, s): return $δ(s, v)$ for all $v ∈ V$ , and a shortest-path tree containing a shortest path from $s$ to every $v ∈ V$ (defined below)
- Each problem above is at least as hard as every problem above it (i.e., you can use a black-box that solves a lower problem to solve any higher problem)
- We won’t show algorithms to solve all of these problems
-
Instead, show one algorithm that solves the hardest in $O( V + \vert E \vert )$ time!
Shortest Paths Tree
- How to return a shortest path from source vertex $s$ for every vertex in graph?
- Many paths could have length $Ω(\vert V \vert )$, so returning every path could require $Ω(\vert V \vert ^2) $ time
- Instead, for all $v ∈ V$ , store its parent $P(v)$: second to last vertex on a shortest path from $s$
- Let $P(s)$ be null (no second to last vertex on shortest path from $s$ to $s$)
- Set of parents comprise a $shortest paths tree$ with $O(|V |)$ size! (i.e., reversed shortest paths back to $s$ from every vertex reachable from $s$)
Breadth-First Search (BFS)
- How to compute $δ(s, v)$ and $P(v)$ for all $v ∈ V$ ?
- Store $δ(s, v)$ and $P(v)$ in Set data structures mapping vertices \(v\) to distance and parent
- (If no path from $s$ to \(v\), do not store \(v\) in $P$ and set $δ(s, v)$ to $∞$)
- Idea! Explore graph nodes in increasing order of distance
-
Goal: Compute level sets $L_i = {v v ∈ V and d(s, v) = i}$ (i.e., all vertices at distance $i$) - Claim: Every vertex $v ∈ L_i$ must be adjacent to a vertex $u ∈ L_{i-1}$ (i.e., $v ∈ Adj(u)$)
- Claim: No vertex that is in $L_j$ for some $j < i$, appears in $L_i$
- Invariant: $δ(s, v)$ and $P(v)$ have been computed correctly for all \(v\) in any $L_j$ for $j < i$
- Base case $(i = 1): L_0 = {s}, δ(s, s) = 0, P(s) = None$
- Inductive Step: To compute $L_i$:
- for every vertex \(u\) in $L_{i-1}$:
- for every vertex $v ∈ Adj(u)$ that does not appear in any $L_j$ for $j < i$:
- add \(v\) to $L_i$, set $δ(s, v) = i$, and set $P(v) = u$
- for every vertex $v ∈ Adj(u)$ that does not appear in any $L_j$ for $j < i$:
- for every vertex \(u\) in $L_{i-1}$:
- Repeatedly compute $L_i$ from $L_j$ for $j < i$ for increasing $i$ until $L_i$ is the empty set
- Set $δ(s, v) = ∞$ for any $v ∈ V$ for which $δ(s, v)$ was not set
- Breadth-first search correctly computes all $δ(s, v)$ and $P(v)$ by induction
- Running time analysis:
-
Store each $L_i$ in data structure with $Θ( L_i )$ time iteration and $O(1)$ time insertion (i.e., in a dynamic array or linked list) - Checking for a vertex \(v\) in any $L_j$ for $j < i$ can be done by checking for \(v\) in $P$
- Maintain $δ$ and $P$ in Set data structures supporting dictionary ops in $O(1)$ time (i.e., direct access array or hash table)
- Algorithm adds each vertex \(u\) to $≤ 1$ level and spends $O(1)$ time for each $v ∈ Adj(u)$
- Work upper bounded by $O(1) × \Sigma_{u\in V} deg(u) = O(\vert E \vert )$ by handshake lemma
-
Spend $Θ( V )$ at end to assign $δ(s, v)$ for vertices $v ∈ V$ not reachable from $s$So -
breadth-first search runs in linear time! $O( V + \vert E \vert ) $
-
def bfs(adj, s):
parent = [None for v in adj]
parent[s] = s
levels = [[s]]
while 0 < len(levels[-1]):
level = []
for u in levels[-1]:
for v in adj[u]:
if parent[v] is None:
parent[v] = u
level.append(v)
levels.append(level)
return parents
def unweighted_shortest_path(adj, s, t):
parents = bfs(adj, s)
if parent[t] is None: return None
i = t
path = [t]
while i != s:
i = parent[i]
path.append(i)
return reversed(path)
10 Depth-First Search
Notes
Depth-First Search (DFS)
- Searches a graph from a vertex $s$, similar to BFS
- Solves Single Source Reachability, not Single Source Shortest Paths. Useful for solving other problems (later)!
- Return (not necessarily shortest) parent tree of parent pointers back to $s$.
- Idea! Visit outgoing adjacencies recursively, but never revisit a vertex
- i.e., follow any path until you get stuck, backtrack until finding an unexplored path to explore
- $P(s) = None$, then run $visit(s)$, where
visit(u)- for every $v \in Adj(u)$ that does not appear in $P$:
- set $P(v)= u$ and recursively call
visit(v)
- set $P(v)= u$ and recursively call
- (DFS finishes visiting vertex \(u\), for use later!)
- for every $v \in Adj(u)$ that does not appear in $P$:
def dfs(adj, s, parent=None, order=None):
if parent is None:
parent = [None for v in adj]
parent[s] = s
order = []
for v in adj[s]:
if parent[v] is None:
parent[v] = s
dfs(adj, v, parent, order)
order.append(s)
return parent, order
Correctness
- Claim: DFS visits \(v\) and correctly sets $P(v)$ for every vertex \(v\) reachable from $s$
- Proof: induct on $k$, for claim on only vertices within distance $k$ from $s$
- Base case $(k = 0): P(s)$ is set correctly for $s$ and $s$ is visited
- Inductive step: Consider vertex \(v\) with $δ(s, v) = k’ + 1$
- Consider vertex \(u\), the second to last vertex on some shortest path from $s$ to \(v\)
- By induction, since $δ(s, u) = k’$ , DFS visits \(u\) and sets $P(u)$ correctly
- While visiting \(u\), DFS considers $v ∈ Adj(u)$
- Either \(v\) is in $P$, so has already been visited, or \(v\) will be visited while visiting \(u\)
- In either case, \(v\) will be visited by DFS and will be added correctly to $P$ $\square$
Running Time
- Algorithm
visitseach vertex \(u\) at most once and spends $O(1)$ time for each $v ∈ Adj(u)$ - Work upper bounded by $O(1) × \Sigma_{u \in V}deg(u) = O(\vert E \vert )$
- Unlike BFS, not returning a distance for each vertex, so DFS runs in $O(\vert E \vert )$ time
Full-BFS and Full-DFS
- Suppose want to explore entire graph, not just vertices reachable from one vertex
- Idea! Repeat a graph search algorithm $A$ on any unvisited vertex
- Repeat the following until all vertices have been visited:
- Choose an arbitrary unvisited vertex $s$, use $A$ to explore all vertices reachable from $s$
- We call this algorithm Full-A, specifically Full-BFS or Full-DFS if A is BFS or DFS
- Visits every vertex once, so both Full-BFS and Full-DFS run in $O(\vert V \vert + \vert E \vert )$ time
def full_dfs(adj):
parent = [None for v in adj]
order = []
for v in range(len(adj)):
if parent[v] is None:
parent[v] = v
dfs(adj, v, parent, order)
return parent, order
DFS Edge Classification
- Consider a graph edge from vertex \(u\) to \(v\), we call the edge a tree edge if the edge is part of the DFS tree (i.e. $parent[v] = u$)
- Otherwise, the edge from \(u\) to \(v\) is not a tree edge, and is either:
- a back edge - \(u\) is a descendant of \(v\)
- a forward edge - \(v\) is a descendant of \(u\)
- a cross edge - neither are descendants of each other
Graph Connectivity
- An undirected graph is connected if there is a path connecting every pair of vertices
- In a directed graph, vertex \(u\) may be reachable from \(v\), but $v$ may not be reachable from \(u\)
- Connectivity is more complicated for directed graphs (we won’t discuss in this class)
Connectivity(G): is undirected graph G connected?Connected_Components(G): given undirected graph $G = (V, E)$, return partition of $V$ into subsets $V_i ⊆ V$ (connected components) where each $V_i$ is connected in $G$ and there are no edges between vertices from different connected components- Consider a graph algorithm $A$ that solves Single Source Reachability
- Claim: $A$ can be used to solve Connected Components
- Proof: Run Full-$A$. For each run of $A$, put visited vertices in a connected component $\square$
Topological Sort
- A Directed Acyclic Graph (DAG) is a directed graph that contains no directed cycle
- A Topological Order of a graph $G = (V, E)$ is an ordering $f$ on the vertices such that: every $edge (u, v) ∈ E$ satisfies $f(u) < f(v)$
- Exercise: Prove that a directed graph admits a topological ordering if and only if it is a DAG
- How to find a topological order?
- A Finishing Order is the order in which a Full-DFS finishes visiting each vertex in G
- Claim: If $G = (V, E)$ is a DAG, the reverse of a finishing order is a topological order
- Proof: Need to prove, for every $edge (u, v) ∈ E$ that \(u\) is ordered before $v$,
i.e., the visit to $v$ finishes before visiting \(u\). Two cases:
- If \(u\) visited before $v$:
- Before visit to \(u\) finishes, will visit $v$ (via $(u, v)$ or otherwise)
- Thus the visit to $v$ finishes before visiting \(u\)
- If $v$ visited before \(u\):
- \(u\) can’t be reached from $v$ since graph is acyclic
- Thus the visit to $v$ finishes before visiting \(u\)
- If \(u\) visited before $v$:
Cycle Detection
- Full-DFS will find a topological order if a graph $G = (V, E)$ is acyclic
- If reverse finishing order for Full-DFS is not a topological order, then $G$ must contain a cycle
- Check if $G$ is acyclic: for each edge $(u, v)$, check if $v$ is before \(u\) in reverse finishing order
- Can be done in $O(\vert E \vert )$ time via a hash table or direct access array
- To return such a cycle, maintain the set of ancestors along the path back to $s$ in Full-DFS
- Claim: If $G$ contains a cycle, Full-DFS will traverse an edge from $v$ to an ancestor of $v$
- Proof: Consider a cycle $(v_0, v_1, . . . , v_k, v_0)$ in $G$
- Without loss of generality, let $v_0$ be the first vertex visited by Full-DFS on the cycle
- For each $v_i$, before visit to $v_i$ finishes, will visit $v_{i+1}$ and finish
- Will consider edge $(v_i, v_{i+1})$, and if $v_{i+1}$ has not been visited, it will be visited now
- Thus, before visit to $v_0$ finishes, will visit $v_k$ (for the first time, by $v_0$ assumption)
- So, before visit to $v_k$ finishes, will consider $(v_k, v_0)$, where $v_0$ is an ancestor of $v_k$ $\square$
11 Weighted Shortest Paths
Notes
Weighted Graphs
-
A weighted graph is a graph $G = (V, E)$ together with a weight function $w: E \rightarrow Z$
-
i.e., assign each edge $e = (u, v) \in E$ an integer weight: $w(e) = w(u, v)$
-
Many applications for edge weights in a graph:
- distances in road network
- latency in network connections
- strength of a relationship in a social network
-
Two common ways to represent weights computationlly:
- Inside graph representation: store edge weight with each vertex in adjacency lists
- Store separate Set data structure mapping each edge to its weight
-
We assume a representation that allows querying the weight of an edge in $O(1)$ time
-
Examples
Weighted Paths
- The weight $w(\pi)$ of a path $\pi$ in a weighted graph is the sum of weights of edges in the path
- The (weighted) shortest path from $s \in V$ to $t \in V$ is path of minimum weight from $s$ to $t$
-
$\delta(s, t) = inf{w(\pi) \ path \ \pi \ from \ s \ to \ t}$ is the shortest-path weight from $s$ to $t$ - (Often use “distance” for shortest -path weight in weighted graphs, not number of edges)
- As with unweighted graphs:
- $\delta(s,t) = \inf$ if no path from $s$ to $t$
- Subpaths of shortest paths are shortest paths (or else could splice in a shortest path)
- Why infimum not minimum? Possible that no finite-length minimum-weight path exists
-
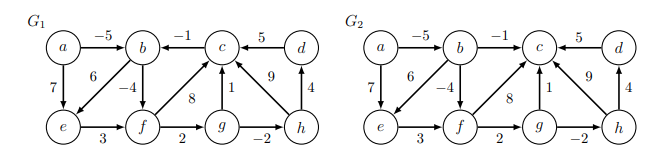
When? Can occur if there is a negative-weight cycle in the graph, Ex: $(b,f,g,c,b)$ in $G1$
- A negative-weight cycle is a path $\pi$ starting and ending at same vertex $w(\pi) < 0$
- $\delta (s, t) = - \infty$ if there is a path from $s$ to $t$ through a vertex on a negative-weight cycle
- If this occurs, don’t want a shortest path, but may want the negative-weight cycle
Weighted Shortest Paths Algorithms
- Already know one algorithm: Breadth-First Search! Runs in $O(\vert V \vert + \vert E \vert )$ time when, e.g.:
- graph has positive weights, and all weights are the same
- graph has positive weights, and sum of all weights at most $O(\vert V \vert + \vert E \vert )$
- For general weighted graphs, we don’t know how to solve SSSP in $O(\vert V \vert + \vert E \vert )$ time
- But if your graph is a Directed Acyclic Graph you can!
| Restrictions | SSSP Algorithm | |||
|---|---|---|---|---|
| Graph | Weights | Name | Running Time $O(\cdot)$ | |
| General | Unweighted | BFS | $\vert V \vert + \vert E \vert $ | |
| DAG | Any | DAG Relaxation | $\vert V \vert + \vert E \vert $ | |
| General | Any | Bellman-Ford | $\vert V \vert \cdot\vert E \vert $ | |
| General | Non-negative | Dijkstra | $\vert V \vert log\vert V \vert + \vert E \vert $ |
Shortest-Paths Tree
- For BFS, we kept track of parent pointers during search. Alternatively, compute them after!
- If know $\delta(s, v)$ for all vertices $v\in V$, can construct shortest-path tree in $O(\vert V \vert + \vert E \vert )$ time
- For weighted shortest paths from $s$, only need parent pointers for vertices $v$ with finite $\delta(s, v)$
- Initialize empty $P$ and set $P(s) = None$
- For each vertex $u\in V$ where $\delta(s, u)$ is finite:
- For each outgoing neighbor $v \in Adj^+(u)$:
- If $P(v)$ not assigned and $\delta(s, v) = \delta(s, u) + w(u, v)$
- There exits a shortest path through edge $(u, v)$, so set $P(v) = u$
- If $P(v)$ not assigned and $\delta(s, v) = \delta(s, u) + w(u, v)$
- For each outgoing neighbor $v \in Adj^+(u)$:
- Parent pointers may traverse cycles of zero weight. Mark each vertex in such a cycle.
- For each unmarked vertex $u\in V$ (including vertices later marked):
- For each $v\in Adj^+(u)$ where $v$ is marked and $\delta(s, v) = \delta(s, u) + w(u, v)$
- Unmark vertices in cycle containing $v$ by traversing parent pointers from $v$
- Set $P(v) = u$, breaking the cycle
- For each $v\in Adj^+(u)$ where $v$ is marked and $\delta(s, v) = \delta(s, u) + w(u, v)$
Relaxation
- A relaxation algorithm searches for a solution to an optimization problem by starting with a solution that is not optimal, then iteratively improves the solution until it becomes an optimal solution to the original problem.
def try_to_relax(adj, w, d, parent, u, v):
if d[v] > d[u] + w(u, v):
d[v] = d[u] + w(u, v)
parent[v] = u
def general_relax(adj, w, s):
d = [float('inf') for _ in adj]
parent = [None for _ in adj]
d[s], parent[s] = 0, s
while some_edge_relaxable(adj, w, d):
(u, v) = get_relaxable_edge(adj, w, d)
try_to_relax(adj, w, d, parent, u, v)
return d, parent
DAG Relaxation
- Idea! Maintain a distance estimate $d(s, v)$ (initially $\infty$ ) for each vertex $v\in V$, that always upper bounds true distance $\delta(s, v)$, then gradually lowers until $d(s, v) = \delta(s, v)$
- When do we lower? When an edge violates the triangle inequality!
- Triangle Inequality: the shortest-path weight from \(u\) to $v$ cannot be greater than the shortest path from \(u\) to $v$ through another vertex $x$, i.e., $\delta(u, v) \neq \delta(u, x) + \delta(x, v)$ for all $u, v, x \in V$
- If $d(s, v) > d(s, u) + w(u, v)$ for some edge $u, v$, then triangle inequality is violated :(
- Fix by lowering $d(s, v)$ to $d(s, u) + w(u, v)$, i.e., relax $(u, v)$ to satisfy violated constraint
- Claim: Relaxation is safe: maintains that each $d(s, v)$ is weight of a path to $v$ (or $\infty$) $\forall v \in V$
- Proof: Assume $d(s, v’)$ is weight of a path (or $\infty$) for $\forall v’ \in V$. Relaxing some edge $(u, v)$ sets $d(s, v)$ to $d(s, u) + w(u, v)$, which is the weight of a path from $s$ to $v$ through \(u\) $\qquad \square$
- Set $d(s, v) = \infty$ for all $v \in V$, then set $d(s, s) = 0$
- Process each vertex \(u\) in a topological sort order of G:
- For each outgoing neighbor $v \in Adj^+(u)$:
- If $d(s, v) > d(s, u) + w(u, v)$
- relax edge $(u, v)$, i.e., set $d(s, v) = d(s, u) + w(u, v)$
- If $d(s, v) > d(s, u) + w(u, v)$
- For each outgoing neighbor $v \in Adj^+(u)$:
def DAGRelaxation(adj, w, s):
_, order = dfs(adj, s)
d = [float('inf') for _ in adj]
parent = [None for _ in adj]
d[s], parent[s] = 0, s
for u in order:
for v in adj[u]:
try_to_relax(adj, w, d, parent, u, v)
return d, parent
Correctness
- Claim: At end of DAG Relaxation: $d(s, v) = \delta(s, v)$ for all $v\in V$
- Proof: Induct on $k$: $d(s, v) = \delta(s, v)$ for all $v$ in first $k$ vertices in topological order
- Base case: Vertex $s$ and every vertex before $s$ in topological order satisfies claim at start
- Inductive Step: Assume claim holds for first $k’$ vertices, let $v$ be the $(k’+1)^{th}$
- Consider a shortest path from $s$ to $v$, and let \(u\) be the vertex preceding $v$ on path
- \(u\) occurs before $v$ in topological order, so $d(s, u) = \delta(s, u)$ by induction
- When processing $u, d(s, v)$ is set to be no larger than $\delta(s, u) + w(u, v) = \delta(s, v)$
- But $d(s, v) \geq \delta(s, v)$ since relaxation is safe, so $d(s, v) = \delta(s, v)$
- Alternatively:
-
For any vertex $v$, DAG relaxation sets $d(s, v) = min { d(s,u) + w(u, v) u \in dj^-(v) }$ - Shortest path to $v$ must pass through some incoming neighbor \(u\) of $v$
- So if $d(s, u) = \delta(s, u)$ for all $u \in Adj^-(v)$ by induction, then $d(s, v) = \delta(s, v)$
-
Running Time
- Initialization takes $O(\vert V \vert )$ time, and Topological Sort takes $O(\vert V \vert + \vert E \vert )$ time
- Additional work upper bounded by $O(1) \times \Sigma_{u\in V}deg^+(u) = O(\vert E \vert )$
- Total running time is linear, $O(\vert V \vert + \vert E \vert )$
12 Bellman-Ford
Notes
Simple Shortest Paths
- If graph contains cycles and negative weights, might contain negative-weight cycles :(
- If graph does not contain negative-weight cycles, shortest paths are simple!
- Claim 1: If $\delta(s, v)$ is finite, there exists a shortest path to $v$ that is simple
- Proof: By contradiction:
- Suppose no simple shortest path: let $\pi$ be a shortest path with fewest vertices
- $\pi$ not simple, so exists cycle $C$ in $\pi$; $C$ has non-negative weight (or else $\delta(s,v) = -\infty$)
- Removing $C$ form $\pi$ forms path $\pi’$ with fewest vertices and weight $w(\pi’) \leq w(\pi)$
- Since simple paths cannot repeat vertices, finite shortest paths contain at most $\vert V \vert - 1$ edges
Negative Cycle Witness
- k-Edge Distance $\delta_k(s, v)$: the minimum weight of any path from $s$ to $v$ using $\leq k$ edges
- Idea! Compute $\delta_{\vert V \vert -1}(s, v)$ and $\delta_{\vert V \vert }(s, v)$ for all $v \in V$
- If $\delta(s, v)\neq - \infty, \delta(s, v) = \delta_{\vert V \vert -1}(s,v)$, since a shortest path is simple (or nonexistent)
- If $\delta_{\vert V \vert }(s,v) < \delta_{\vert V \vert - 1}(s, v)$
- there exists a shorter non-simple path to $v$, so $\delta_{\vert V \vert }(s, v) = -\infty$
- call $v$ a (negative cycle) witness
- However, there may be vertices with $-\infty$ shortest-path weight that are not witness
- Claim 2: if $\delta(s,v) = - \infty$, then $v$ is reachable from a witness
- Proof: Suffices to prove: every negative-weight cycle reachable from s contains a witness
- Consider a negative-weight cycle $C$ reachable from $s$
- For $v ∈ C$, let $v’ ∈ C$ denote $v$’s predecessor in $C$, where $\Sigma_{v∈C} w(v’ , v) < 0$
- Then $\delta_{\vert V \vert }(s, v) \leq \delta_{\vert V \vert - 1}(s, v’) + w(v’, v)$ (RHS weight of some path on $\leq \vert V \vert $ vertices)
- so $\Sigma_{v\in C}\delta_{\vert V \vert }(s, v) \leq \Sigma_{v\in C}\delta_{\vert V \vert -1}(s, v’) + \Sigma_{v\in C}w(v’, v) < \Sigma_{v\in C}\delta_{\vert V \vert - 1}(s, v’)$
- If $C$ contains no witness, $\delta_{\vert V \vert }(s, v) \geq \delta_{\vert V \vert - 1}(s, v)$ for all $v \in C$, a contradiction $\qquad \square$
Bellman-Ford
- Idea! Use graph duplication: make multiple copies (or levels) of the graph
- $\vert V \vert + 1$ levels: vertex $v_k$ in level $k$ represents reaching vertex $v$ from $s$ using $\leq k$ edges
- If edges only increase in level, resulting graph is a DAG!
- Construct new DAG $G’ = (V’, E’)$ from $G = (V, E)$
- $G’$ has $\vert V \vert (\vert V \vert + 1)$ vertices $v_k$ for all $v\in V$ and $k \in {0, …, \vert V \vert }$
- $G’$ has $\vert V \vert (\vert V \vert + \vert E \vert )$ edges:
- \(\vert V \vert\) edges $(v_{k-1}, v_k)$ for $k \in {1, …, \vert V \vert }$ of weight zero for each $v \in V$
- \(\vert V \vert\) edges $(u_{k-1}, v_k)$ for $k \in {1, …, \vert V \vert }$ of weight $w(u, v)$ for each $(u, v) \in E$
- Run DAG Relaxation on $G’$ from $s_0$ to compute $\delta(s_0, v_k)$ for all $v_k \in V’$
-
For each vertex: set $d(s, v) = \delta(s_0, v_{ v-1 })$ - For each witness $u \in V$ where $\delta (s_0, u_{\vert V \vert }) < \delta(s_0, u_{\vert V \vert - 1})$
- For each vertex $v$ reachable from \(u\) in $G$:
- set $d(s, v) = -\infty$
- For each vertex $v$ reachable from \(u\) in $G$:
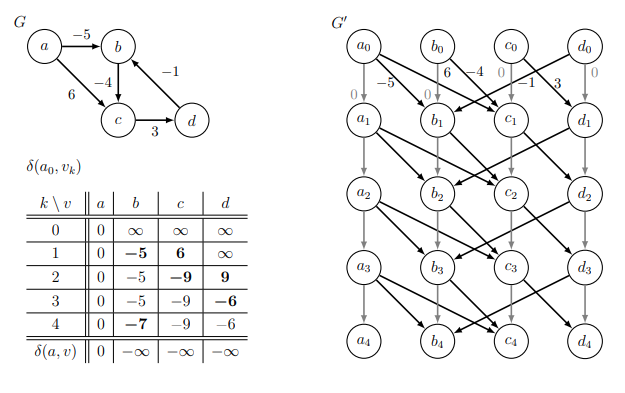
INF = float('inf')
def bellman_ford(adj, w, s):
# initialization
d = [INF for _ in adj]
parent = [None for _ in adj]
d[s], parent[s] = 0, s
V = len(adj)
# construct shortest paths in rounds
for k in range(V-1):
for u in range(V):
for v in adj[u]:
try_to_relax(adj, w, d, parent, u, v)
# check for negative weight cycles accessible from s
for u in range(V):
for v in adj[u]:
if d[v] > d[u] + w(u, v):
raise Exception("found a negative weight in cycle!")
return d, parent
TBC
Running Time
-
$G’$ has size $O( V ( V + \vert E \vert ))$ and can be constructed in as much time - Running DAG Relaxation on $G’$takes linear time in the size of $G’$
- Does $O(1)$ work for each vertex reachable from a witness
- Finding reachability of a witness takes $O(\vert E \vert )$ time, with at most $O(\vert V \vert )$ witnesses: $O(\vert V \vert \vert E \vert )$
- (Alternatively, connect super node $x$ to witnesses via 0-weight edges, linear search from $x$)
- Pruning $G$ at start to only subgraph reachable from $s$ yields $O(\vert V \vert \vert E \vert )$ time algorithm
13 Dijkstra’s Algorithm
Notes
Non-negative Edge Weights
- Idea! Generalize BFS approach to weighted graphs:
- Grow a sphere centered at source s
- Repeatedly explore closer vertices before further ones
- But how to explore closer vertices if you don’t know distances beforehand? :(
- Observation 1: If weights non-negative, monotonic distance increasing along shortest paths
- i.e., if vertex \(u\) appears on a shortest path from $s$ to $v$, then $\delta(s, u) \leq \delta(s, v)$
- Let $V_x \subset V$ be the subset of vertices reachable within distance $\leq x$ from $s$
- If $v \in V_x$ then any shortest path from $s$ to $v$ only contains vertices from $V_x$
- Perhaps grow $V_x$ one vertex at a time! (but growing for every $x$ is slow if weights large)
- Observation 2: Can solve SSSP fast if given order of vertices in increasing distance from $s$
- Remove edges that go against this order (since cannot participate in shortest paths)
- May still have cycles if zero-weight edges: repeatedly collapse into single vertices
- Compute $\delta(s, v)$ for each $v\in V$ using DAG relaxation in $O(\vert V \vert + \vert E \vert )$ time
Dijkstra’s Algorithm
-
Idea! Relax edges from each vertex in increasing order of distance from source $s$
-
Idea! Efficiently find next vertex in the order using a data structure
-
Changeable Priority Queue $Q$ on items with keys and unique IDs, supporting operations:
Operation Specification Q.build(X)initialize $Q$ with items in iterator XQ.delete_min()remove an item with minimum key Q.decrease_key(id, k)find stored item with ID idand change key tok -
Implement by cross-linking a Priority Queue $Q’$ and a Dictionary $D$ mapping IDs into $Q’$
-
Assume vertex IDs are integers from $0$ to $\vert V \vert -1$ so can use a direct access array for D
-
For brevity, say item x is the tuple $(x.id, x.key)$
-
Set $d(s, v) = \infty$ for all $v \in V$, then set $d(s,s) = 0$
-
Build changeable priority queue $Q$ with an item $(v, d(s, v))$ for each vertex $v \in V$
- For vertex $v$ in outgoing adjacencies $Adj^+(u)$:
- If $d(s, v)>d(s,u) + w(u, v)$:
- Relax edge $(u, v)$, i.e., set $d(s, v) = d(s, u) + w(u, v)$
- Decrease the key of $v$ in $Q$ to new estimate $d(s, v)$
- If $d(s, v)>d(s,u) + w(u, v)$:
- For vertex $v$ in outgoing adjacencies $Adj^+(u)$:
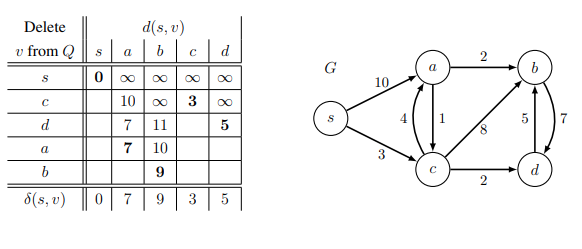
def dijkstra(adj, w, s):
d = [INF for _ in adj]
parent = [None for _ in adj]
d[s], parent[s] = 0, s
Q = PriorityQueue()
V = len(adj)
for v in range(V):
Q.insert(v, d[v]) # label and key
for _ in range(V):
u = Q.extract_min() # get label for item with min key
for v in adj[u]:
try_to_relax(adj, w, d, parent, u, v)
Q.decrease_key(v, d[v]) # alter key for given label
return d, parent
class PriorityQueue:
def __init__(self):
self.A = {}
def insert(self, label, key):
self.A[label] = key
def extract_min(self):
min_label = None
for label in self.A:
if (min_label is None) or (self.A[label] < self.A[min_label]):
min_label = label
del self.A[min_label]
return min_label
def decrease_key(self, label, key):
if (label in self.A) and (key < self.A[label]):
self.A[label] = key
class Item:
def __init__(self, label, key):
self.label, self.key = label, key
def __lt__(self, other):
return self.key < other.key
class PriorityQueue:
def __init__(self):
self.A = []
self.label_2_idx = dict()
def insert(self, label, key):
item = Item(label, key)
self.A.append(item)
idx= len(self.A) - 1
self.label_2_idx[label] = idx
heapq._siftdown(self.A, 0, idx)
def extract_min(self):
label = self.A[0].label
self.A[0], self.A[-1] = self.A[-1], self.A[0]
self.label_2_idx[self.A[0].label] = 0
self.label_2_idx.pop(self.A[-1].label)
self.A.pop()
if self.A: heapq._siftup(self.A, 0)
return label
def decrease_key(self, label, key):
if label in self.label_2_idx:
idx = self.label_2_idx[label]
if self.A[idx].key < key:
self.A[idx].key = key
heapq._siftdown(self.A, 0, idx)
Correctness
-
Claim: At end of Dijkstra’s algorithm $d(s, v) = \delta(s, v)$ for all $v \in V$
-
Proof:
-
If relaxation sets $d(s, v)$ to $\delta(s, v)$, then $d(s, v) = \delta(s, v)$ at the end of the algorithm
- Relaxation can only decrease estimates $d(s, v)$
- Relaxation is safe, i.e., maintains that each $d(s, v)$ is weight of a path to $v$ (or $\infty$)
-
Suffices to show $d(s, v) = \delta(s, v)$ when vertex $v$ is removed from $Q$
-
Proof by induction on first $k$ vertices removed from $Q$
-
Base Case ($k$ = 1): $s$ is first vertex removed from $Q$, and $d(s, s) = 0 = δ(s, s)$
-
Inductive Step: Assume true for $k < k’$ , consider $k’$ th vertex $v_0$ removed from $Q$
-
Consider some shortest path $π$ from $s$ to $v’$, with $w(π) = δ(s, v’ )$
-
Let $(x, y)$ be the first edge in $π$ where $y$ is not among first $k’ - 1$ (perhaps $y = v’$ )
-
When $x$ was removed from $Q$, $d(s, x) = δ(s, x)$ by induction, so: \(\begin{align} d(s, y) &\leq \delta(s, x) + w(x, y) \\ &=\delta(s, y) \\ &\leq \delta(s, v') \\ &\leq d(s, v') \\ &\leq d(s, y) \\ \end{align}\)
-
So $d(s, v’) = \delta(s, v’)$ as desired
-
-
Running Time
-
Count operations on changeable priority queue Q, assuming it contains n items:
Operation Time Occurrences in Dijkstra Q.build(X)$B_n$ 1 Q.delete_min()$M_n$ |V| Q.decrease_key(id, k)$D_n$ |E| -
Total running time is $O(B_{\vert V \vert } + \vert V \vert \cdot M_{\vert V \vert } + \vert E \vert \cdot D_{\vert V \vert })$
-
Assume pruned graph to search only vertices reachable from the source, so $ V = O(\vert E \vert )$
TBC
15 Recursive Algorithms
Notes
Design your own recursive algorith
- Constant-sized program to solve arbitrary input
- Need looping or recursion, analyze by induction
- Recursive function call: vertex in a graph, directed edge from $A\rightarrow B$ if $B$ calls $A$
- Dependency graph of recursive calls must be acyclic (if can terminate)
- Classify based on shape of graph
| Class | Graph |
|---|---|
| Brute Force | Star |
| Decrease & Conquer | Chain |
| Divide & Conquer | Tree |
| Dynamic Programming | DAG |
| Greedy / Incremental | Subgraph |
- Hard part is thinking inductively to construct recurrence on subproblems
- How to solve a problem recursively (SRT BOT)
- Subproblem definition
- Relate subproblem solutions recursively
- Topological order on subproblems ($\Rightarrow$ subproblem DAG)
- Base cases of relation
- Original problem solution via subproblems(s)
- Time analysis
Merge Sort in SRT BOT Framework
- Merge sorting an array $A$ of \(n\) elements can be expressed in SRT BOT as follows:
- Subproblems: $S(i,j)=$ sorted array on elements of $A[i:j]$ for $i \leq i \leq j \leq n$
- Relation: $S(i,j) = merge(S(i, m), S(m, j))$ where $m=\lfloor (i+j) / 2 \rfloor$
- Topological order: Increasing $j - i$
- Base cases: $S(i, i + 1) = [A[i]]$
- Original: $S(0, n)$
- Time: $T(n) = 2T(n/2) + O(n) = O(nlogn)$
Fibonacci Numbers
- Compute the \(n\)th Fibonacci number $F_n$
- Subproblems: $F(i)=$ the $i$th Fibonacci number $F_i$ for $i \in {0,1,…, n}$
- Relation: $F(i) = F(i-1)+F(i-2)$ (definition of Fibonacci numbers)
- Topological order: Increasing $i$
- Base cases: $F(0) = 0, F(1) = 1$
- Original problem: $F(n)$
def fib(n):
if n < 2: return n
return fib(n-1) + fib(n-2)
- Divide and conquer implies a tree of recursive calls
- Time: $T(n) = T(n-1)+T(n-2) + O(1) > 2T(n-2), T(n) = \Omega(2 ^{n/2})$ exponential… :(
- Subproblem $F(k)$ computed more than once! ($F(n-k)$ times)
- Can we avoid this waste?
Re-using Subproblem Solutions
- Either:
- Top down: record subproblem solutions in a memo and re-use
- Bottom up: solve subproblems in topological sort order (usually via loops)
- For Fibonacci, $n + 1$ subproblems (vertices) and $<2n$ dependencies (edges)
- Time to compute is then $O(n)$ additions
def fib(n):
memo = dict()
def F(i):
if i < 2: return i
if i not in memo:
memo[i] = F(i-1) + F(i-2)
return memo[i]
return F(n)
def fib(n):
F = dict()
F[0], F[1] = 0, 1
for i in range(2, n+1):
F[i] = F[i-1] + F[i-2]
return F[n]
- A subtlety is that Fibonacci numbers grow to $\Theta(n)$ bits long, potentially $\gg$ word size $w$
- Each addition costs $O(\lceil n / w \rceil)$ time
- So total cost is $O(n\lceil n / w \rceil) = O(n + n^2/w)$ time
Dynamic Programming
- Weird name coined by Richard Bellman
- Wanted government funding, needed cool name to disguise doing mathematics!
- Updating (dynamic) a plan or schedule (program)
- Existence of recursive solution implies decomposable subproblems
- Recursive algorithm implies a graph of computation
- Dynamic programming if subproblem dependencies overlap (DAG, in-degree > 1)
- “Recurse but re-use” (Top down: record and lookup subproblem solutions)
- “Careful brute force” (Bottom up: do each subproblem in order)
- Often useful for counting/optimization problems: almost trivially correct recurrences
How to Solve a Problem Recursively (SRT BOT)
- Subproblem definition subproblem $x\in X$
- Describe the meaning of a subproblem in words, in terms of parameters
- Often subsets of input: prefixes, suffixes, contiguous substrings of a sequence
- Often record partial state: add subproblems by incrementing some auxiliary variable
- Relate subproblem solutions recursively $x(i) = f(x(j),…)$ for one or more $j < i$
- Topological order: to argue relation is acyclic and subproblems form a DAG
- Base cases
- State solutions for all (reachable) independent subproblems where relation breaks down
- Original problem
- Show how to compute solution to original problem from solutions to subproblem(s)
- Possibly use parent pointers to recover actual solution, not just objective function
- Time analysis
-
$\Sigma_{x\in X}work(x), $ or if $work(x)=O(W)$ for all $x\in X$, then $ X \cdot O(W)$ - $work(x)$ measures non-recursive work in relation; treat recursions as taking $O(1)$ time
-
DAG Shortest Paths
- DAG SSSP problem: given a DAG G and vertex $s$, compute $\delta(s, v)$ for all $v\in V$
- Subproblems: $\delta(s, v)$ for all $v\in V$
- Relation: $\delta(s, v)=min{\delta(s, u) + w(u, v) \vert u \in Adj^-(v)} \cup {\infty}$
- Topological order: Topological order of G
- Base case: $\delta(s, s) = 0$
- Original: All subproblem
- Time: $\Sigma_{v\in V}O(1+\vert A dj^-(v)\vert ) = O(\vert V \vert +\vert E \vert )$
- DAG Relaxation computes the same min values as this dynamic program, just
- step-by-step (if new value < min, update min via edge relaxation), and
- from the perspective of \(u\) and $Adj^+(u)$ instead of $v$ and $Adj^-(v)$
How to Relate Subproblem Solutions
- The general approach we’re following to define a relation on subproblem solutions:
- Identify a question about a subproblem solution that, if you knew the answer to, would reduce to “smaller” subproblem(s)
- Then locally brute-force the question by trying all possible answers, and taking the best
- Alternatively, we can think of correctly guessing the answer to the question, and directly recursing; but then we actually check all possible guesses, and return the “best”
- The key for efficiency is for the question to have a small (polynomial) number of possible answers, so brute forcing is not too expensive
- Often (but not always) the non-recursive work to compute the relation is equal to the number of answers we’re trying
16 Dynamic Programming Subproblems
Notes
Longest Common Subsequence (LCS)
- Given two strings $A$ and $B$, find a longest (not necessarily contiguous) subsequence of $A$ that is also a subsequence of $B$.
- Example: $A=hieroglyphology \ B=michaelangelo$
- Solution: $hello$ or $heglo$ or $iello$ or $ieglo$, all length 5
- Maximization problem on length of subsequence
- Subproblems:
- $x(i, j)=$ length of the longest common subsequence of suffixes $A[i:]$ and $B[j:]$
- For $0\leq i \leq \vert A \vert $ and $0 \leq j \leq \vert B \vert $
- Relate:
- Either first characters match or they don’t
- If first characters match, some longest common subsequence will use them
- (if no LCS uses first matched pair, using it will only improve solution)
- (if an LCS uses first in $A[i]$ but not first in $B[j]$, matching $B[j]$ is also optimal)
- If they do not match, they cannot both be in a longest common subsequence
- Guess whether $A[i]$ or $B[j]$ is not in LCS
- $x(i, j) = \begin{cases} x(i + 1, j+1) + 1 \qquad if A[i] = B[j]\max{x(i+1, j), x(i,j+1)} \qquad otherwise \end{cases}$
- Topological order:
- Subproblem $x(i, j)$ depend only on strictly larger $i$ or $j$ or both
- Simplest order to state: Decreasing $i + j$
- Nice order for bottom-up code: Decreasing $i$, then decreasing $j$
- Base
- $x(i, \vert B \vert ) = x(\vert A \vert , j)=0$ (one string is empty)
- Original problem
- Length of longest common subsequence of $A$ and $B$ is $x(0,0)$
- Store parent pointers to reconstruct subsequencce
- If the parent pointer increases both indices, add that character to LCS
- Time:
- # subproblems: $(\vert A \vert + 1)\cdot(\vert B \vert + 1)$
- work per subproblem: $O(1)$
- $O(\vert A \vert \ cdot \vert B \vert ) $ running time
def lcs(A, B):
a, b = len(A), len(B)
x = [[0] * (b + 1) for _ in range(a + 1)]
for i in reversed(range(a)):
for j in reversed(range(b)):
if A[i] == B[j]:
x[i][j] = x[i + 1][j + 1] + 1
else:
x[i][j] = max(x[i + 1][j], x[i][j + 1])
return x[0][0]
def lcs(A, B):
a, b = len(A), len(B)
x = [[0] * (b + 1) for _ in range(a + 1)]
for i in range(1, a + 1):
for j in range(1, b + 1):
if A[i] == B[j]:
x[i][j] = x[i - 1][j - 1] + 1
else:
x[i][j] = max(x[i - 1][j], x[i][j - 1])
return x[0][0]
Longest Increasing Subsequence (LIS)
- Given a string \(A\), find a longest (not necessarily contiguous) subsequence of \(A\) that strictly increases (lexicographically).
- Example: \(A= carbohydrate\)
- Solution: \(abort\) of length 5
- Maximization problem on length of subsequence
- Attempted solution:
- Natural subproblems are prefixes or suffixes of \(A\), say suffix \(A[i :]\)
- Natural question about LIS of \(A[i :]\): is \(A[i]\) in the LIS? (2 possible answers)
- But then how do we recurse on \(A[i + 1 :]\) and guarantee increasing subsequence?
- Fix: add constraint to subproblems to give enough structure to achieve increasing property
- Subproblems
- \(x(i)\) = length of longest increasing subsequence of suffix \(A[i:]\) that includes \(A[i]\)
- For \(0\leq i \leq \vert A \vert\)
- Relate
- We’re told that \(A[i]\) is in LIS (first element)
- Next question: what is the second element of LIS?
- Could be any \(A[j]\) where \(j > i\) and \(A[j] > A[i]\) (so increasing)
- Or \(A[i]\) might be the last element of LIS
- \[x(i) = max\{1 + x(j) \vert i < j < \vert A \vert , A[j] > A[i]\} \cup \{1\}\]
- Topological order:
- Decreasing \(i\)
- Base
- No base case necessary, because we consider the possibility that \(A[i]\) is last
- Original problem
- What is the first element of LIS? Guess!
- Length of LIS of \(A\) is \(max\{x(i) \vert 0\leq i < \vert A \vert \}\)
- Store parent pointers to reconstruct subsequence
- Time
- # subproblems: \(\vert A \vert\)
- work per subproblem \(O( \vert A \vert )\)
- \(O( \vert A \vert ^2)\) running time
- speed up to \(O( \vert A \vert log \vert A \vert )\) by doing only \(O(log \vert A \vert )\) work per subproblem, via AVL tree augmentation
def lis(A):
a = len(A)
x = [1] * a
for i in reversed(range(a)):
for j in range(i, a):
if A[j] > A[i]:
x[i] = max(x[i], 1 + x[j])
return max(x)
Alternating Coin Game
- Given sequence of n coins of value \(v_0, v_1,...,v_{n1}\)
- Two players (“me” and “you”) take turns
- In a turn, take first or last coin among remaining coins
- My goal is to maximize total value of my taken coins, where I go first
- First solution exploits that this is a zero-sum game: I take all coins you don’t
- Subproblems
- Choose subproblems that correspond to the state of the game
- For every contiguous subsequence of coins from \(i\) to \(j\), \(0\leq i \leq j < n\)
- \(x(i, j)=\) maximum total value I can take starting from coins of values \(v_i, ..., v_j\)
- Relate
- I must choose either coin \(i\) or coin \(j\) (Guess!)
- Then it’s your turn, so you’ll get values \(x(i+1, j)\) or \(x(i, j-1)\) respectively
- To figure out how much value I get, subtract this from total coin values
- \(x(i,j) = max\{v_i + \Sigma_{k=i+1}^{j} v_k \qquad x(i + 1, j), v_j + \Sigma_{k=i}^{j}v_k \qquad x(i, j-1)\}\) ???
- Topological order
- Increasing \(j - i\)
- Base
- \[x(i,i) = v_i\]
- Original problem
- \[x(0, n- 1)\]
- store parent pointers to reconstruct strategy
- Time
- # subproblems: \(\Theta(n^2)\)
- work per subproblem: \(\Theta(n)\) to compute sums
- \(\Theta(n^3)\) running time
- Speed up to \(\Theta(n^2)\) time by pre-computing all sums \(\Sigma_{k=i}^{j}v_k\) in \(\Theta(n^2)\) time via dynamic programming
- Second solution uses subproblem expansion: add subproblems for when you move next
- Subproblems
- Choose subproblems that correspond to the full state of the game
- Contiguous subsequence of coins from \(i\) to \(j\), and which player \(p\) goes next
- \(x(i, j, p) =\) maximum total value I can take when player \(p \in \{me, you\}\) starts from coins of values \(v_i,...,v_j\)
- Relate
- Player \(p\) must choose either coin \(i\) or coin \(j\) (Guess!)
- If \(p =\) me, then I get the value; otherwise, I get nothing
- Then it’s the other player’s turn
- \[x(i, j, me) = max\{v_i + x(i + 1, j, you), v_j + x(i, j - 1, you)\}\]
- \[x(i, j, you) = min\{x(i + 1, j, me), x(i, j-1, me)\}\]
- Topological order
- Increasing \(j - i\)
- Base
- \[x(i, i, me) = v_i\]
- \[x(i,i,you)=0\]
- Original problem
- \[x(0, n-1, me)\]
- Store parent pointers to reconstruct strategy
- Time
- # subproblems: \(\Theta(n^2)\)
- work per subproblem: \(\Theta(1)\)
- \(\Theta(n^2)\) running time
Yet another alternative solution.
def coin_game(coins):
n = len(coins)
dp = [[0] * n for _ in range(n)]
for i in reversed(range(n)):
for j in range(i, n):
if i == j:
d[i][j] = coins[i]
else:
dp[i][j] = max(coins[i] - dp[i+1][j], coins[j] - dp[i][j-1])
return dp[0][n-1] >= 0
def coin_game(coins):
n = len(coins)
dp = [[0] * n for _ in range(n)]
parents = dict()
for i in reversed(range(n)):
for j in range(i, n):
if i == j:
d[i][j] = coins[i]
parents[(l, r)] = ((l, r), coins[l])
else:
a = coins[i] - dp[i+1][j]
b = coins[j] - dp[i][j-1]
if a > b:
dp[i][j] = a
parents[(l, r)] = ((l+1, r), nums[l])
else:
dp[i][j] = b
parents[(l, r)] = ((l, r-1), nums[r])
if dp[0][n-1] >= 0
state = (0, n-1)
turn = 1
while parents[state][0] != state:
print(f"player {turn % 2} took {parents[state][1]}")
state = parents[state][0]
turn += 1
return dp[0][n-1] >= 0
Subproblem Constraints and Expansion
- We’ve now seen two examples of constraining or expanding subproblems
- If you find yourself lacking information to check the desired conditions of the problem, or lack the natural subproblem to recurse on, try subproblem constraint/expansion!
- More subproblems and constraints give the relation more to work with, so can make DP more feasible
- Usually a trade-off between number of subproblems and branching/complexity of relation
17 Dynamic Programming III
Notes
Single-Source Shortest Paths Revisited
- Subproblems
- Expand subproblems to add information to make acyclic!
- \(\delta_k(s,v)=\) weight of shortest path from \(s\) to \(v\) using at most \(k\) edges
- For \(v\in V\) and \(0 \leq k \leq \vert V \vert\)
- Relate:
- Guess last edge \((u, v)\) on shortest path from \(s\) to \(v\)
- \[\delta_k(s, v) = min\{\delta_{k-1}(s, u) + w(u, v) \vert (u, v) \in E\}\ \cup\ \{\delta_{k-1}(s, v)\}\]
- Topological order:
- Increasing k: subproblems depend on subproblems only with strictly smaller \(k\).
- base
- \(\delta_{0}(s, s)=0\) and \(\delta_0(s, v) = \infty\) for \(v \neq s\) (no edges)
- Original problem
- If has finte shortest path, then \(\delta(s, v) = \delta_{\vert V \vert- 1}(s, v)\)
- Otherwise some \(\delta_{\vert V \vert }(s, v) < \delta_{\vert V \vert - 1}(s, v)\), so path contains a negative-weight cycle
- Can keep track of parent pointers to subproblem that minimized recurrence
- Time
- # subproblems: \(\vert V \vert \times (\vert V \vert +1)\)
- Work for subproblem \(\delta_k(s,v): O(deg_{in}(v))\) \(\Sigma_{k=0}^{\vert V \vert } \Sigma_{v\in V}O(deg_{in}(v)) = \Sigma_{k=0}^{\vert V \vert } O(\vert E \vert ) =O(\vert V \vert \ cdot\vert E \vert )\)
- This is just Bellman-Ford! (computed in a slightly different order)
All-Pairs Shortest Paths: Floyd-Warshall
- Could define subproblem \(\delta_k(u, v)=\) minimum weight of path from \(u\) to \(v\) using at most \(k\) edges, as in Bellman-Ford
- Resulting running time is \(\vert V \vert\) times Bellman-Ford, i.e., \(O(\vert V \vert ^2 \cdot \vert E \vert ) = O(\vert V \vert ^4)\)
- Know a better algorithm from L14: Johnson achieves \(O(\vert V \vert ^2log \vert V+\vert V \vert \cdot\vert E \vert )=O(\vert V \vert ^3)\)
- Can achieve \(\Theta(\vert V \vert ^3)\) running time (matching Johnson for dense graphs) with a simple dynamic program, called Floyd-Warshall.
- Number vertices so that \(V=\{1,...,\vert V \vert \}\)
- Subproblems:
- \(d(u, v, k)=\) minimum weight of a path from \(u\) to \(v\) that only uses vertices from \(\{1,2,...,k\} \cup \{u, v\}\)
- For \(u, v \in V\) and \(1\leq k \leq \vert V \vert\)
- Relate
- \[x(u, v, k)= min\{x(u, k, k-1) + x(k,v,k-1), x(u, v, k-1)\}\]
- Only constant branching! No longer guessing previous vertex/edge
- Topological order
- Increasing \(k\): relation depends only on smaller \(k\)
- Base
- \[x(u, u, 0) = 0\]
- \(x(u, v, 0) = w(u, v)\) if \((u, v)\in E\)
- \(x(u,v,0)=\infty\) if none of the above
- Original problem
- \(x(u, v, \vert V \vert )\) for all \(u, v \in V\)
- Time
- \(O(\vert V \vert ^3)\) subproblems
- Each \(O(1)\) work
- \(O(\vert V \vert ^3)\) in total
- Constant number of dependencies per subproblem brings the factor of \(O(\vert E \vert)\) in the running time down to \(O(\vert V \vert)\)